Self-adaptive teleoperation control method for neural network based on radial basis function
A technology of teleoperation control and neural network, applied in the field of bilateral control and adaptive control, which can solve the problems of unstable teleoperation, failure, undesired calibration and parameter identification, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention is described in further detail below in conjunction with accompanying drawing:
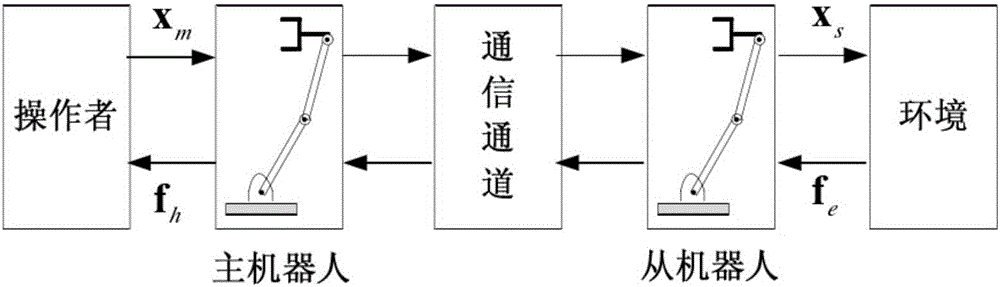
[0046] see Figure 1-Figure 4 , the present invention is based on radial basis function neural network self-adaptive teleoperation control method, comprises the following steps:
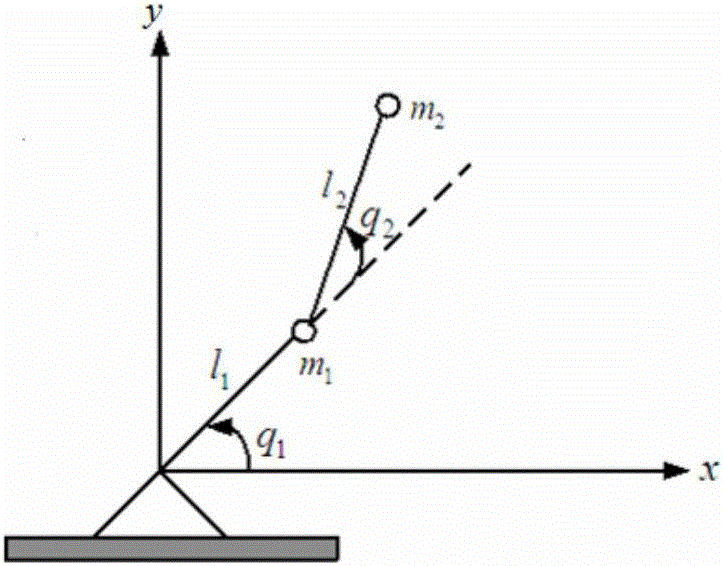
[0047] Step 1: Establish dynamic modeling for the master and slave handsets in the teleoperation system as follows:
[0048] { M m ( q m ) q ·· m ( t ) + C m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More