

Method for adjusting posture of intelligent interaction robot and intelligent interaction robot
An intelligent interaction and robot technology, applied in the field of intelligent interaction, can solve the problem of not being able to prompt the gesture and adjustment of interactive objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
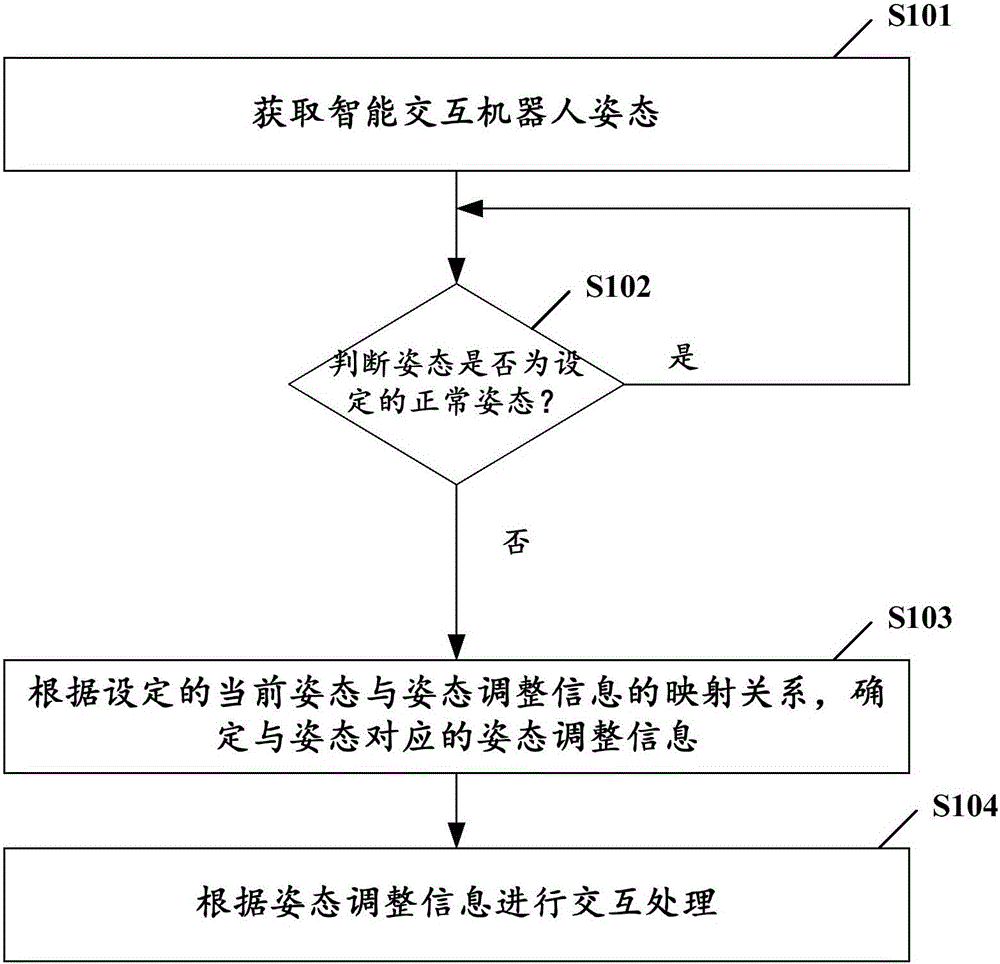
[0054] see figure 1 , the figure shows a method for adjusting the posture of an intelligent interactive robot. The intelligent interactive robot can conduct man-machine dialogue with the interactive object to realize the control and operation of the intelligent interactive robot by the interactive object. The above-mentioned interactive object can be an adult or an infant Toddlers, the specific steps are as follows:
[0055] Step S101, acquiring the posture of the intelligent interactive robot.
[0056] In this embodiment, the posture of the intelligent interactive robot can be a normal posture or an abnormal posture. For example, the standing posture of the intelligent interactive robot is set to a normal posture, and other postures are all abnormal postures. Inverted postures, sideways postures, backward postures, inverted postures, etc. Of course, it can be understood that the specific forms of normal postures and abnormal postures are not limited in this embodiment.
[0...
no. 2 example
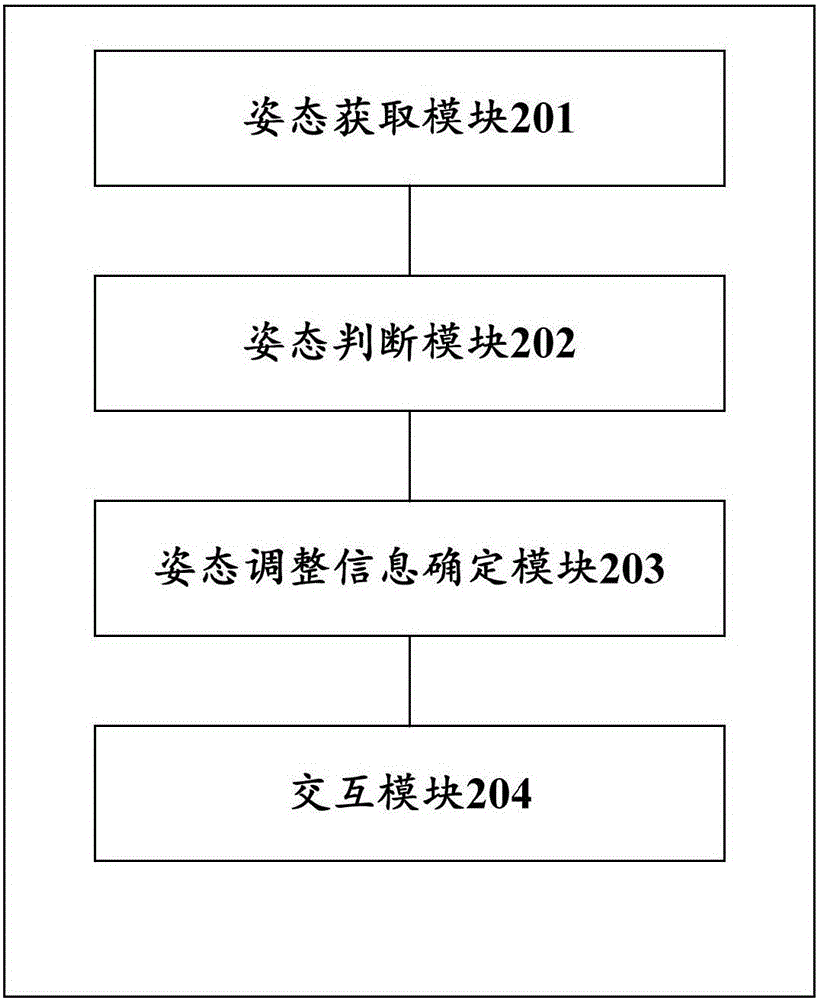
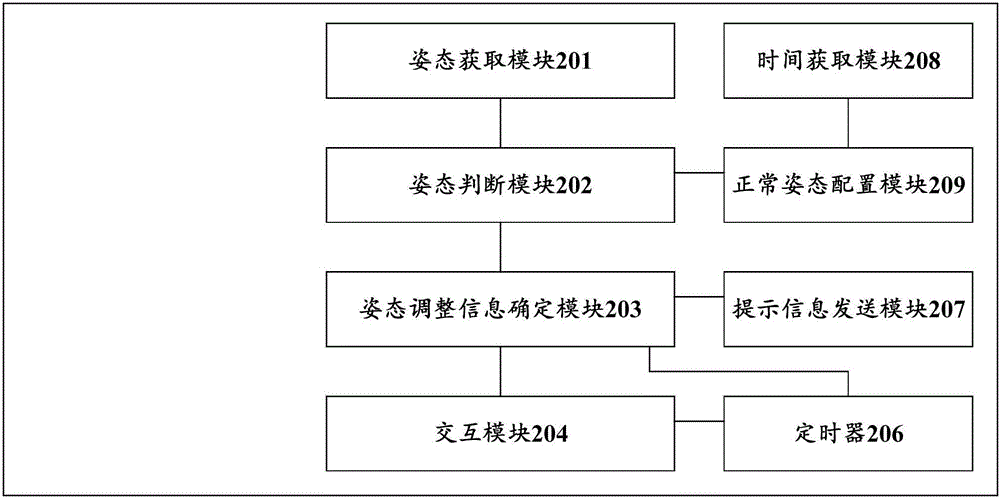
[0076] see figure 2 , the figure shows an intelligent interactive robot, which includes:
[0077] Attitude acquisition module 201, used to acquire the attitude of the intelligent interactive robot;
[0078] A posture judging module 202, configured to judge whether the posture is a set normal posture;
[0079] The posture adjustment information determination module 203 is used to determine the posture adjustment information corresponding to the posture according to the set mapping relationship between the current posture and the posture adjustment information when the posture is not a set normal posture, and the posture adjustment information The information is used to instruct the interactive object to adjust the intelligent interactive robot to a normal posture;
[0080] The interaction module 204 is configured to perform interaction processing according to the posture adjustment information.
[0081] In this embodiment, the interaction module is further configured to: de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More