

Hydraulic swing cylinder and potential sensor closed-loop control based modular robot driving joint
A potentiometric sensor, hydraulic swing technology, applied in fluid pressure actuation devices, manipulators, manufacturing tools, etc., can solve the problem of small driving torque of servo motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to better understand the technical solutions and advantages of the present invention, the present invention will be further described below through specific embodiments and in conjunction with the accompanying drawings.
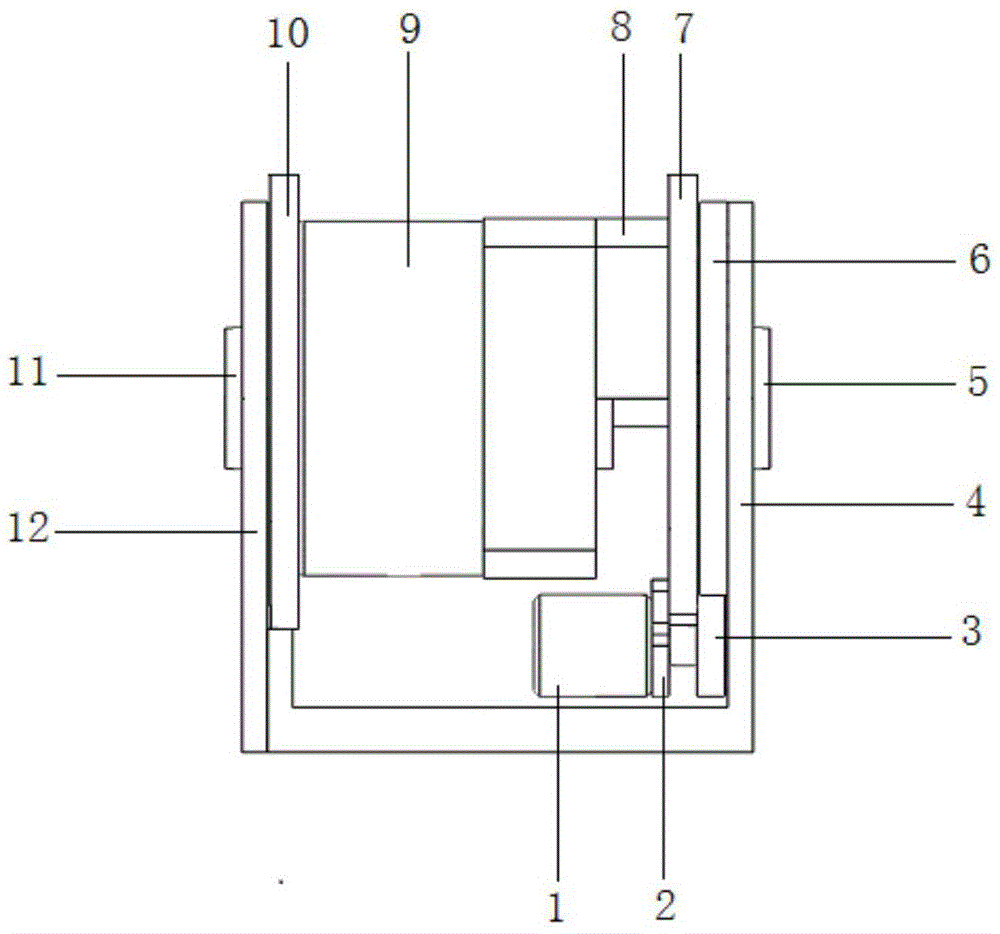
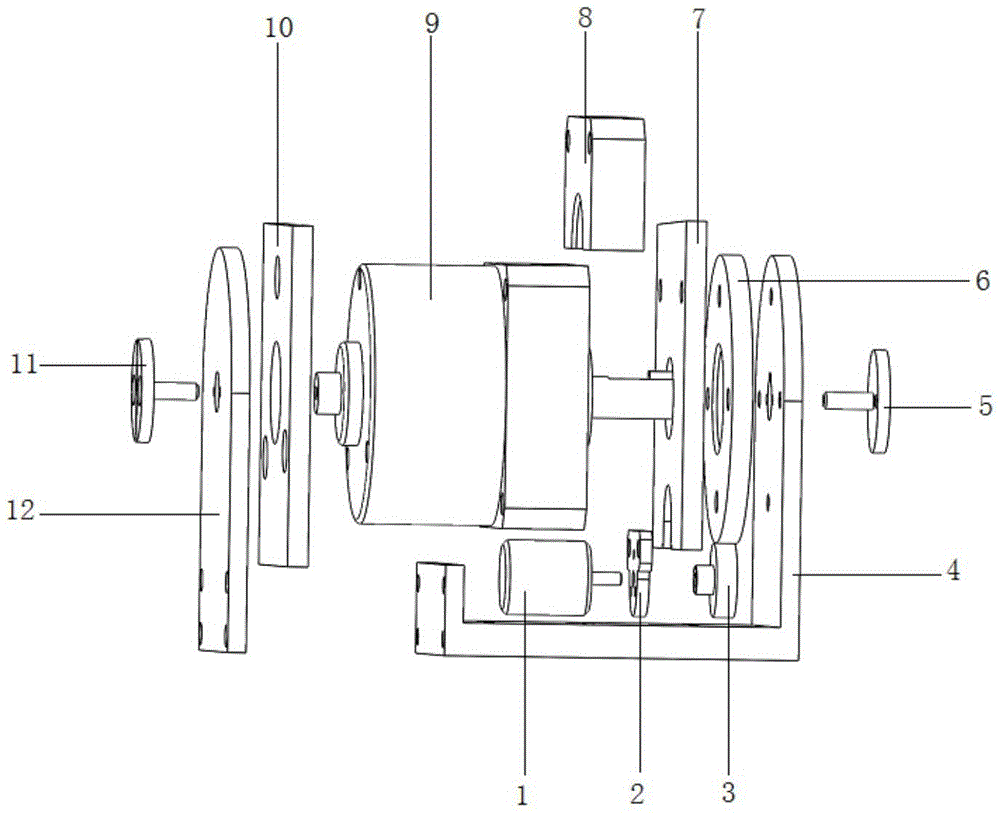
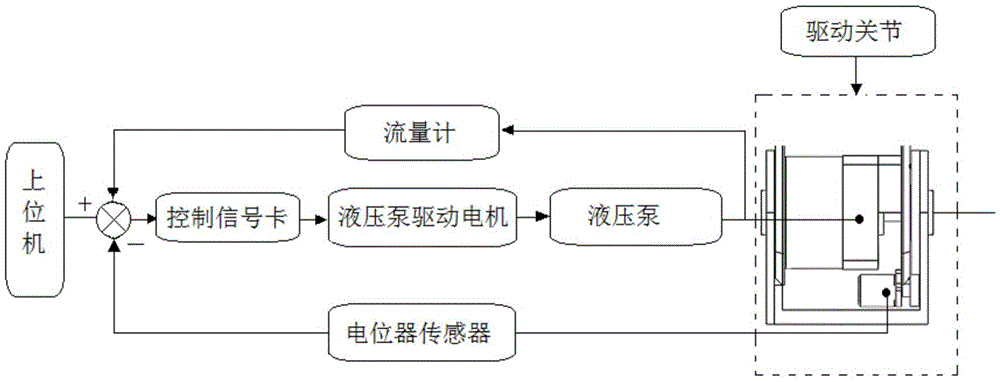
[0018] The invention provides a modular robot-driven joint based on hydraulic swing cylinder and potential sensor closed-loop control, such as figure 1 , figure 2 , image 3 As shown, the entire modular robot drive joint includes a mechanical part and a control part. The mechanical part includes: a drive joint L-shaped bracket 4, a plane side plate 12, a hydraulic swing cylinder 9, a swing cylinder gear 6, and a potentiometer gear 3 , potentiometer connection block 2, hydraulic swing cylinder pad 8, swing cylinder pad A7, swing cylinder pad B10, fixed end cover 11, motor and hydraulic pump bracket 14, coupling 15; the control part includes: upper Machine 20, potential sensor 1, control signal card 18, flow meter 17, hydraulic pump 16, hydra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More