

A method for adaptive sliding control of pure electric drive vehicles
A control method and pure electric drive technology, applied in electric vehicles, control drives, control devices, etc., can solve problems such as driving fatigue, reducing driver workload, and adjusting braking torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
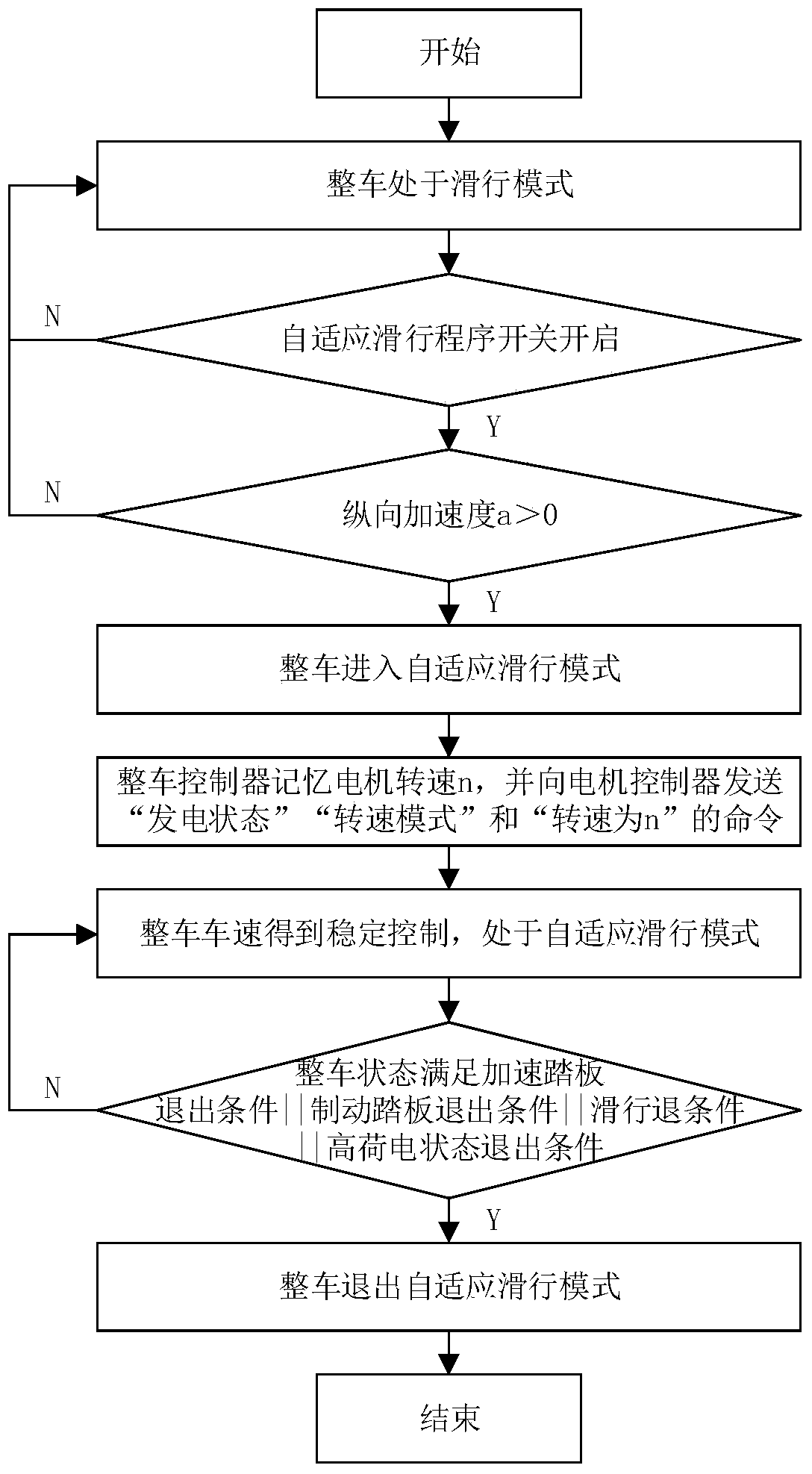
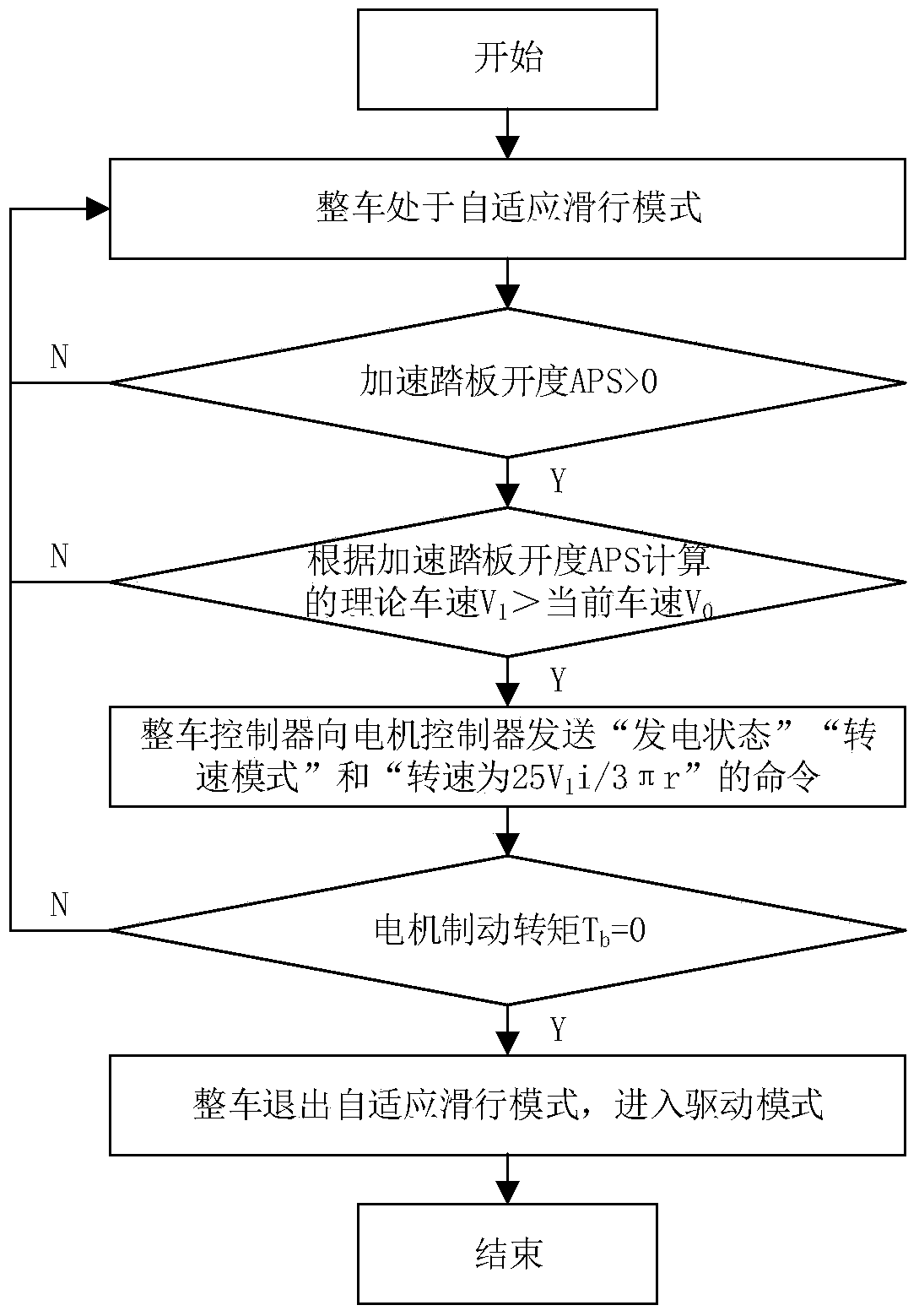
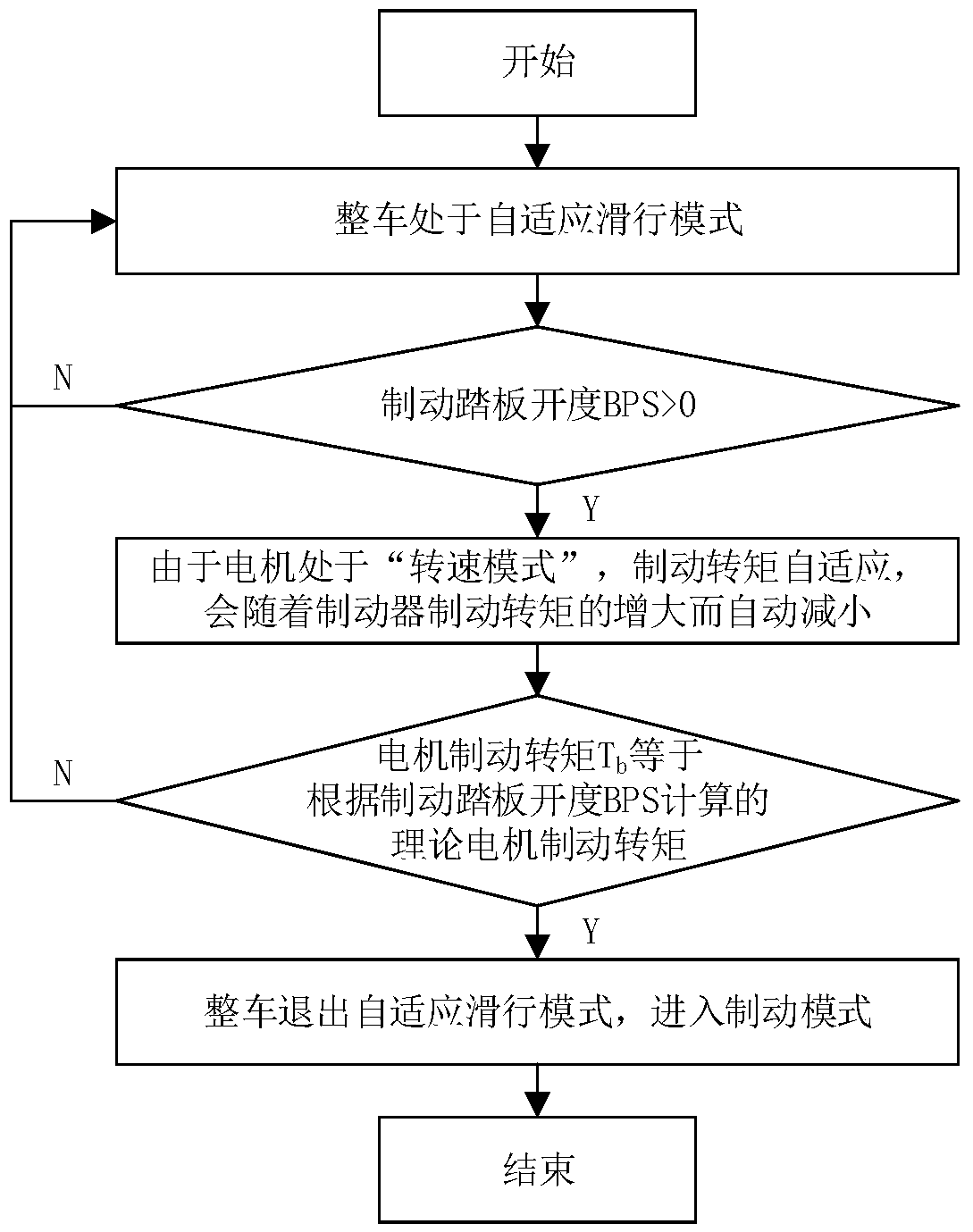
[0038] The present invention is described in detail below in conjunction with accompanying drawing:
[0039] The adaptive sliding control system of the present invention includes a vehicle controller, a motor and its controller, a power battery and its controller. The vehicle controller is responsible for upper-level coordinated control, which is used to send commands to the motor controller and receive signals uploaded by the motor controller and power battery controller. The signals collected by the vehicle controller in real time include vehicle longitudinal acceleration a, motor speed n, and motor drive torque T d , motor braking torque T b and vehicle state parameter signals such as the state of charge of the power battery SOC, as well as the driver's operation signals such as the accelerator pedal opening APS, the brake pedal opening BPS, and the on-off state of the adaptive sliding control program switch. The motor and power battery are controlled by the internal cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More