

Touch information classified computing and modelling method based on machine learning
A modeling method and machine learning technology, applied in computing, instruments, special data processing applications, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] based on the following Figure 1-Figure 6 , specifically explain the preferred embodiment of the present invention.
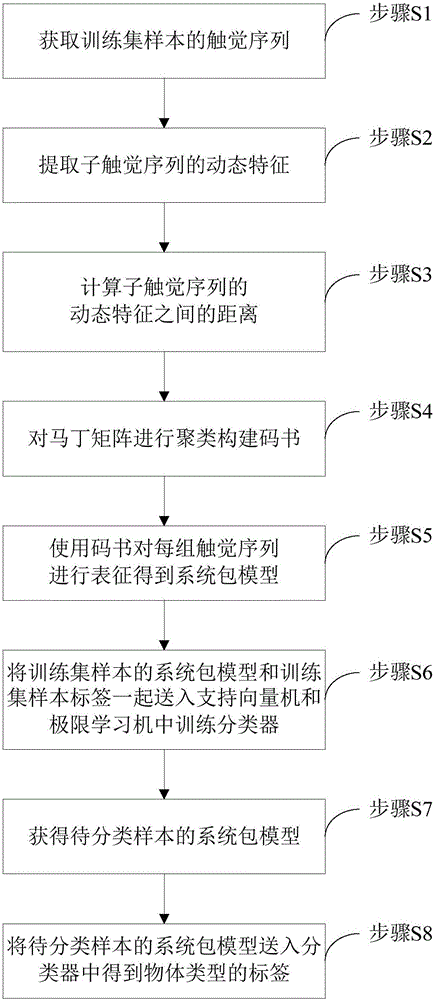
[0081] Such as figure 1 As shown, the present invention provides a machine learning-based computational modeling method for tactile information classification, comprising the following steps:
[0082] Step S1, using the tactile array sensor to obtain the tactile sequence of the training set samples;
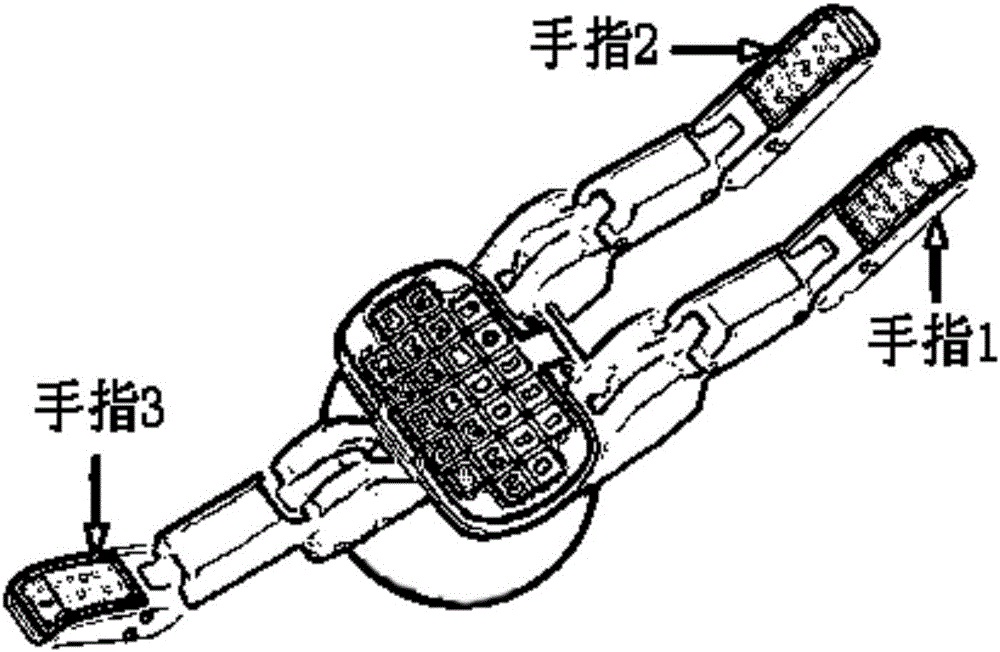
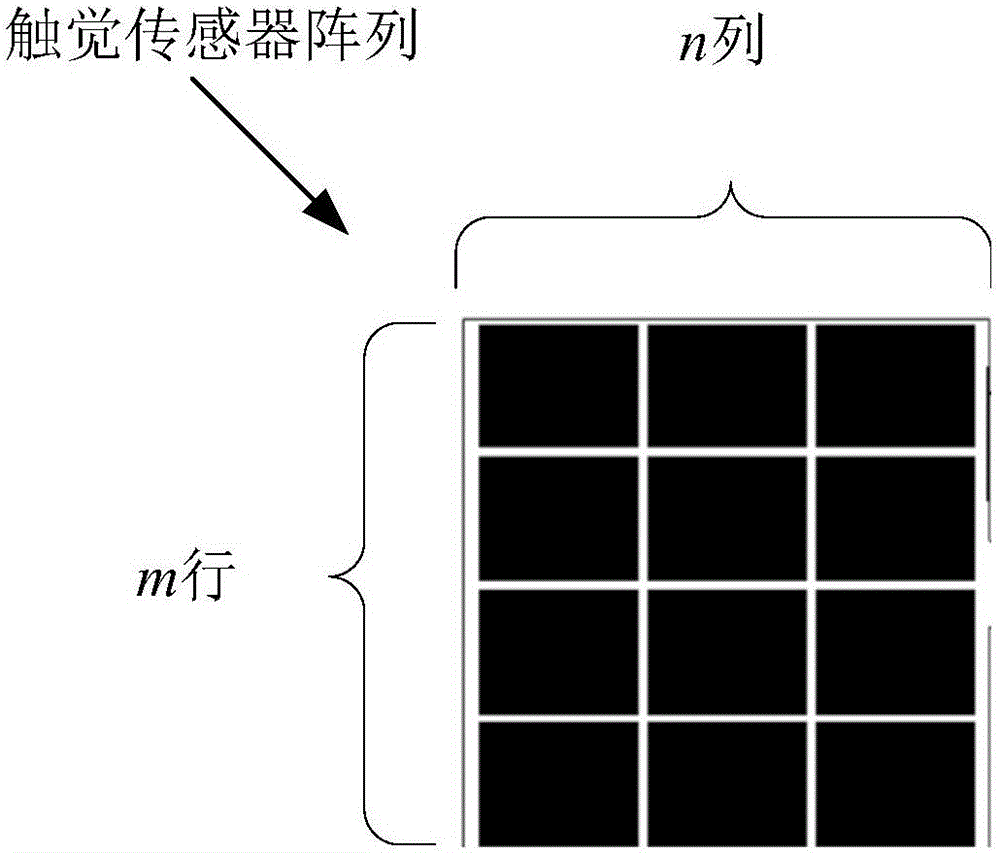
[0083] In this embodiment, the tactile array sensor is set on the dexterous hand at the end of the robotic arm of the robot, such as figure 2 As shown, the dexterous hand has three fingers, which are marked as finger 1, finger 2, and finger 3 respectively, and a tactile array sensor is respectively arranged at the end of each finger, as shown in FIG. image 3 As shown, each tactile array sensor has m×n sensor units, and in each time period, collect tactile data from the m×n sensor units of the tactile array sensor on each finger;
[0084] The tactile s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More