

Scalar-estimation-algorithm-based INS/GNSS combined navigation method
A scalar estimation and integrated navigation technology, applied in the field of navigation, can solve the problems of poor reliability and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention will be described in further detail below in conjunction with the accompanying drawings.
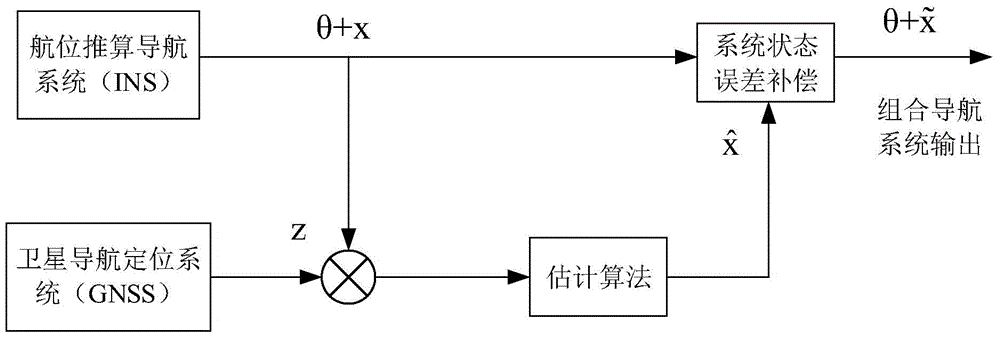
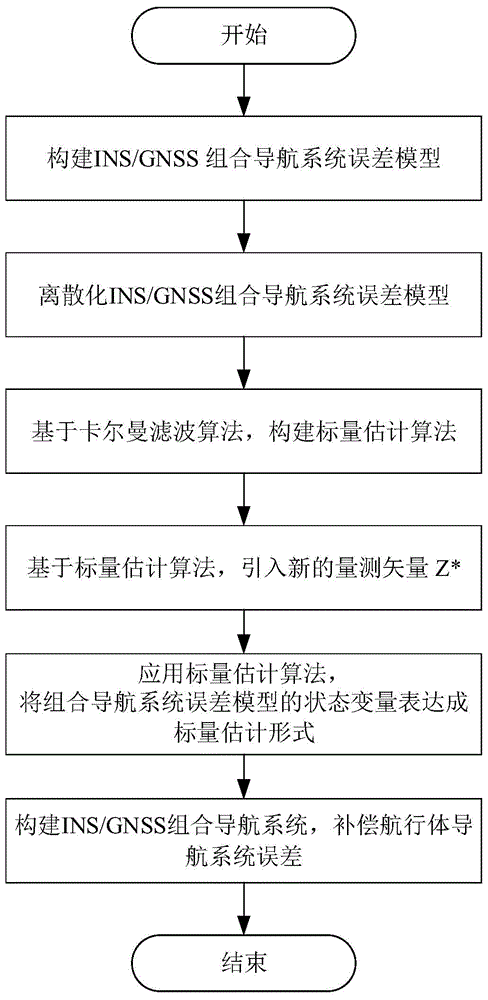
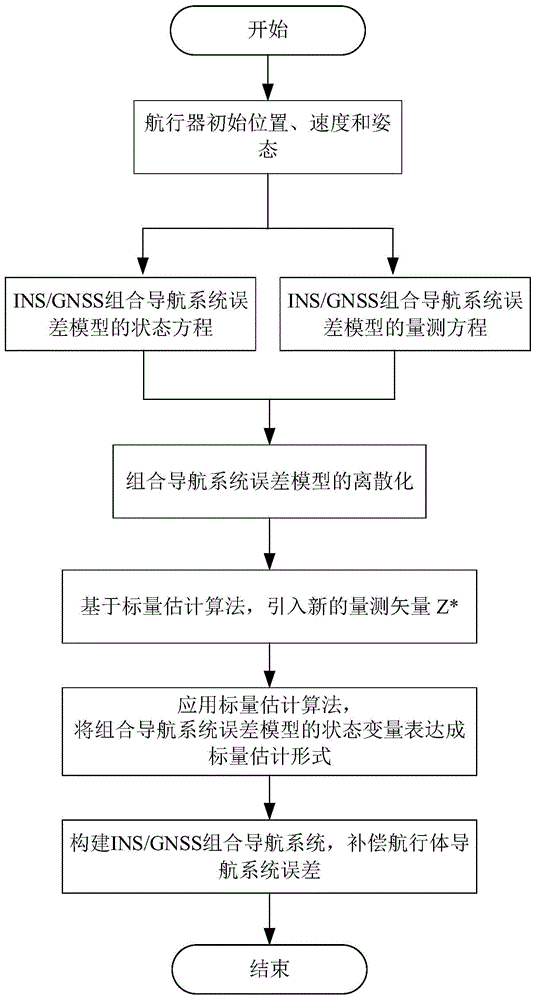
[0099] An INS / GNSS integrated navigation method based on a scalar estimation algorithm, its specific implementation method is: establish an INS / GNSS integrated navigation system error model, discretize the INS / GNSS integrated navigation system error model, and propose a compact scalar estimation algorithm, and propose a construction system measurement vector z * The new method of the paper uses the scalar estimation algorithm to express each state variable in the error model of the integrated navigation system as a scalar estimation form of linear combination of other state variables, combined with figure 1 The INS / GNSS integrated navigation system is constructed, and errors such as position, velocity, attitude and orientation of the integrated navigation system are corrected according to the scalar estimation expression, and the error compensation of the int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More