

Target object three-dimensional color point cloud generation method based on KINECT
A target object, color point cloud technology, applied in the field of virtual reality, can solve the problem that the point cloud data cannot completely express the target object, etc., achieve the effect of low memory space requirements, accurate registration results, and improved search speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
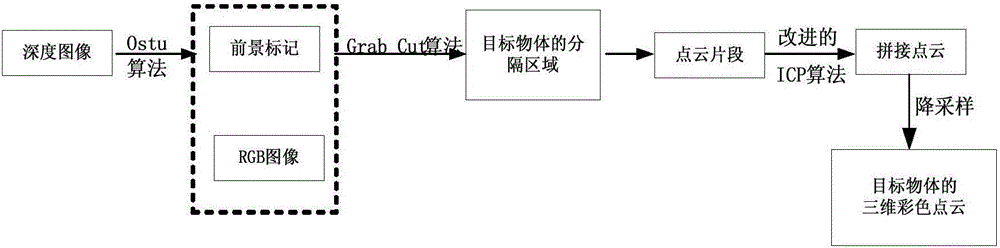
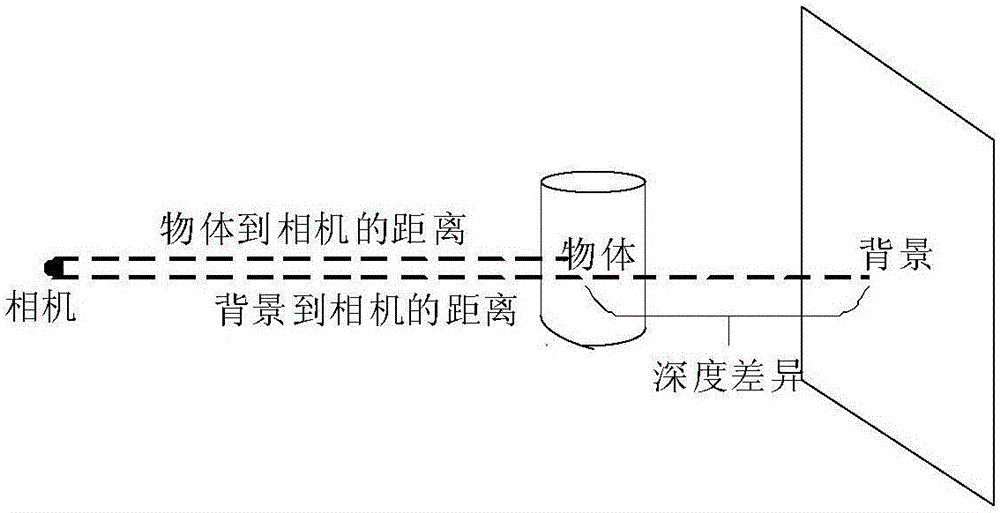
[0033] The present invention carries out according to following 4 steps when carrying out three-dimensional color point cloud generation to target object (such as figure 1 , figure 2 shown):
[0034] Step 1: Obtain an RGBD image containing the target object.
[0035] Kinect is used to take a shot, and the obtained RGBD image (RGB image and depth image, collectively referred to as RGBD image) only contains the local area information of the target object visible from the camera perspective. In order to obtain the complete color information and depth information of the target object, it is necessary to obtain from Shoot the target object from different angles. Use Kinect to shoot around the target object for a week, and obtain multiple RGBD images to contain the complete information of the target object. At the same time, during the shooting process, record the positional relationship (rotation and translation) of two adjacent images as a point cloud registration The initial ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More