

A space super-redundant drive manipulator and assembly method
A technology of driving machinery and space redundancy, applied in the direction of manipulator, program-controlled manipulator, claw arm, etc., can solve the problems of short arm length, small number of degrees of freedom, limited working space of the manipulator base, etc., to ensure the operation accuracy. , the realization of the form is simple, the effect of reducing the difficulty of operation and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below with reference to the accompanying drawings and examples.
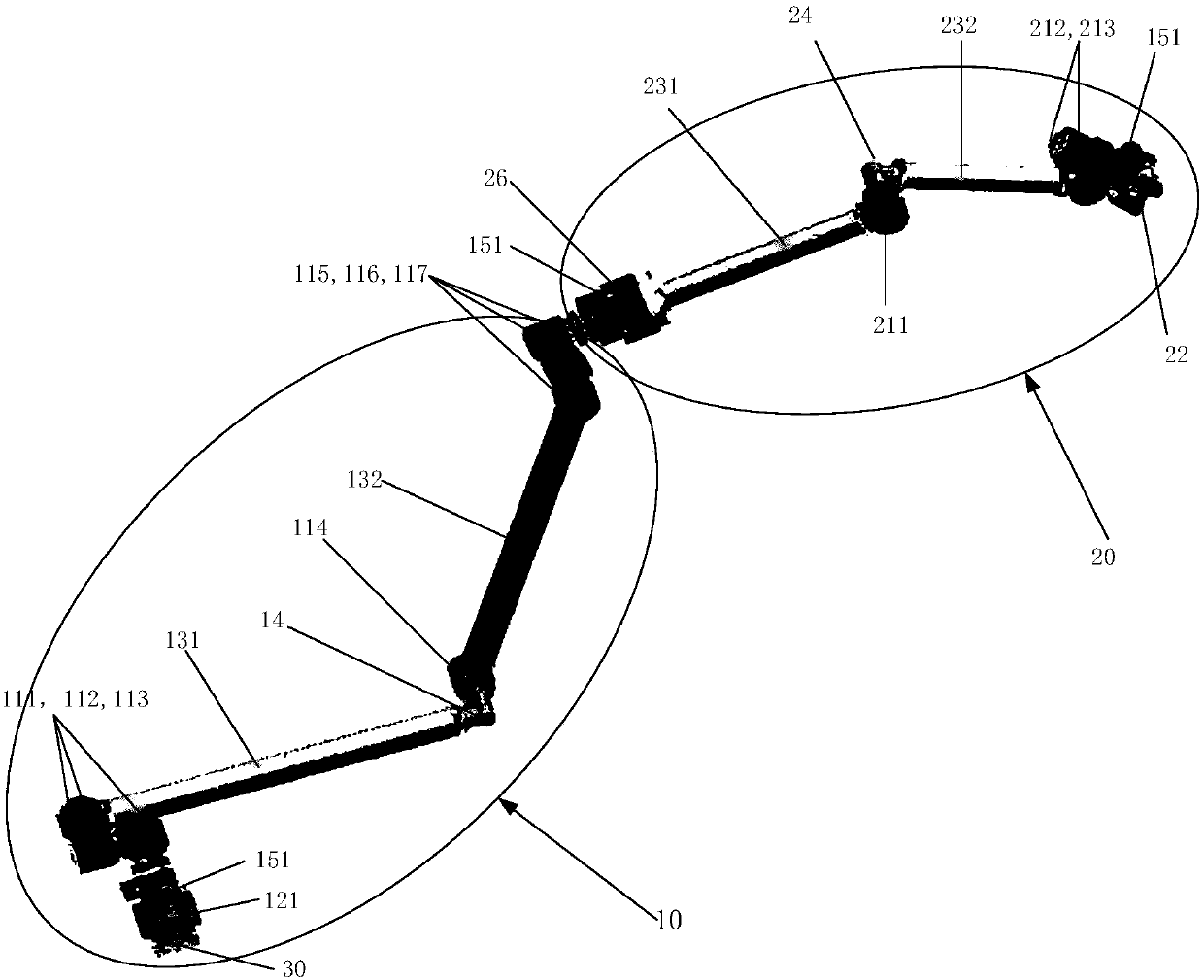
[0032] Such as figure 1 As shown, a super-redundant drive manipulator capable of space on-orbit assembly of the present invention includes: a main manipulator 10 and an auxiliary manipulator 20;
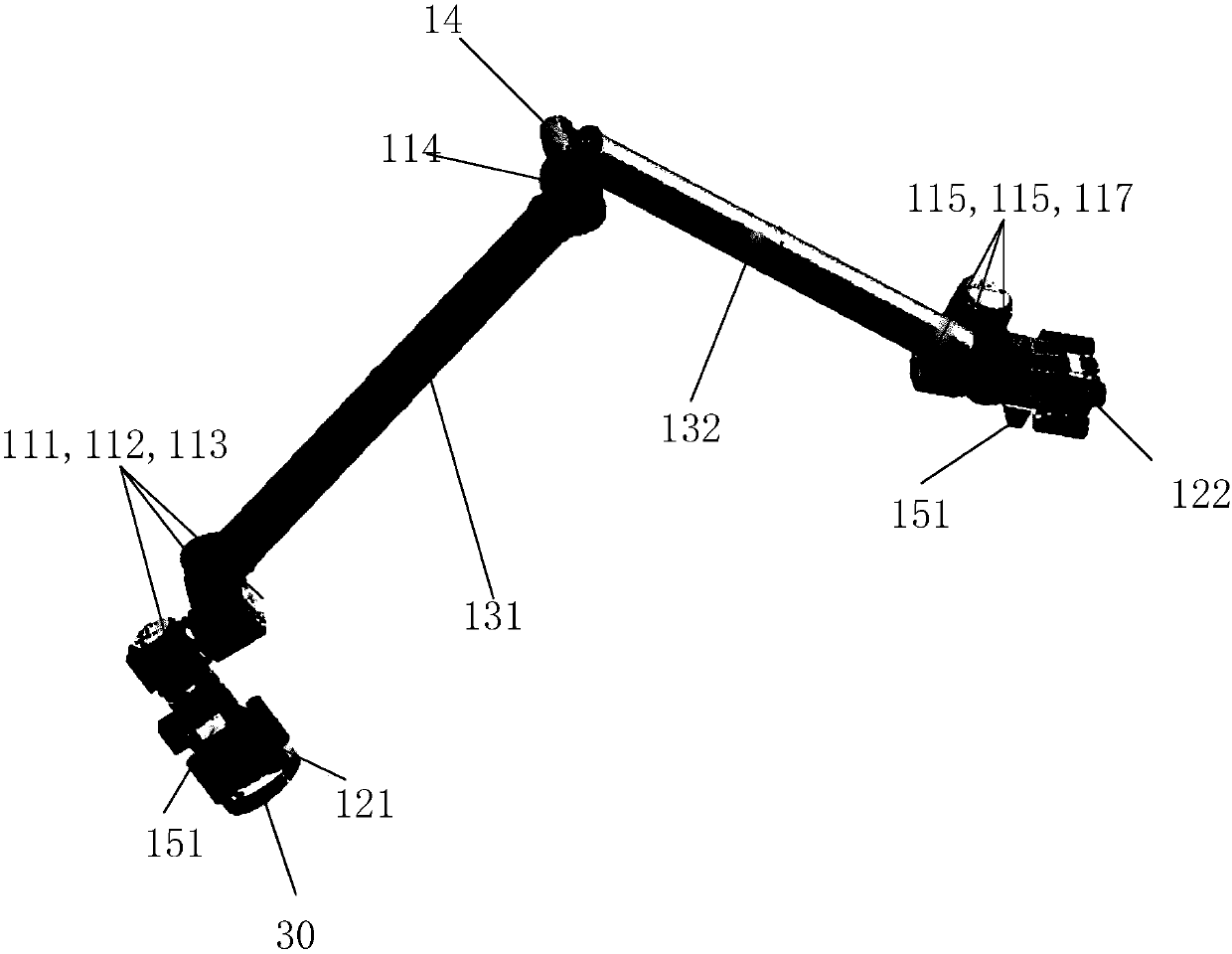
[0033] Such as figure 2 As shown, the main mechanical arm 10 includes a first arm 131, a second arm 132, a main arm elbow joint with one degree of freedom, a main arm shoulder joint with three degrees of freedom, and a main arm with three degrees of freedom. Wrist joint, central controller 14, main arm shoulder end effector 121 and main arm wrist end effector 122;
[0034] One end of the first arm 131 is connected to one end of the second arm 132 through the main arm elbow joint 114; the other end of the first arm 131 is connected to one end of the main arm shoulder joint, and the second The other end of the arm rod 132 is connected to one end of the wrist jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More