

Method of writing standard Chinese characters by using six-degree-of-freedom mechanical arm under control of force
A robotic arm, degree of freedom technology, applied in the direction of program control manipulator, manipulator, program control, etc., can solve the problem of inability to guarantee writing accuracy and safety, and achieve the effect of ensuring accuracy and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings.
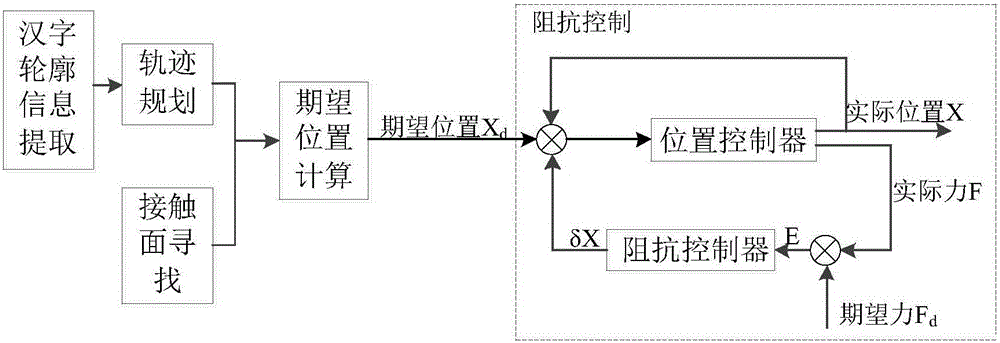
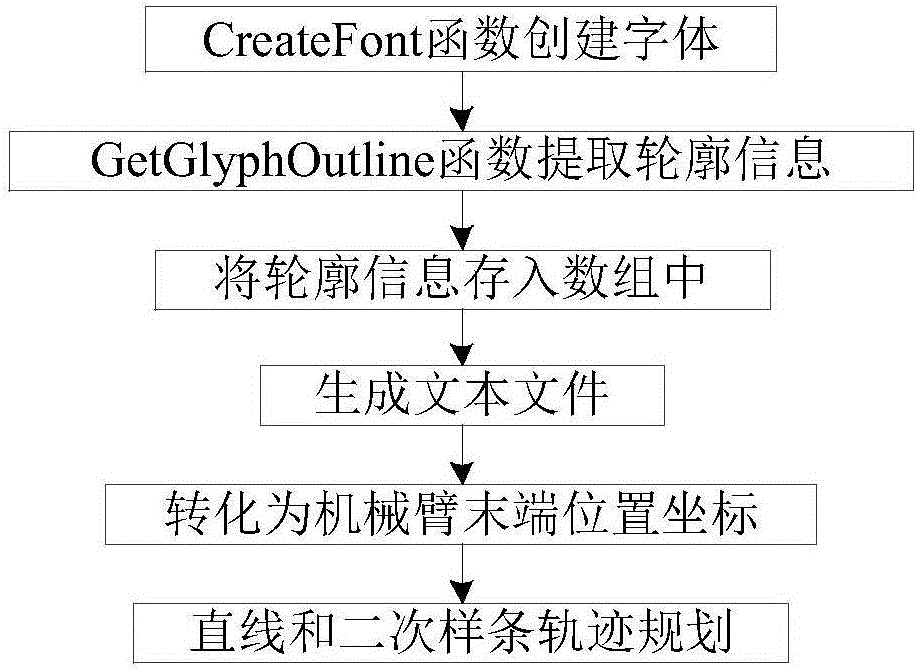
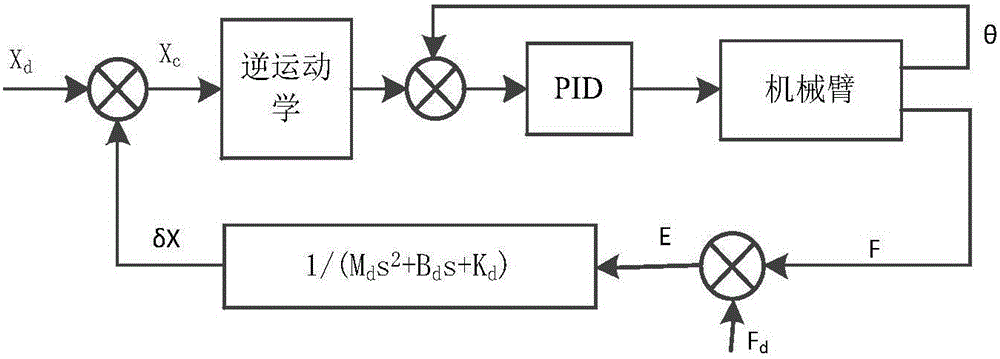
[0040] The invention provides a six-degree-of-freedom mechanical arm standard Chinese character writing system with force control. Aiming at the fact that few people use industrial manipulators in Chinese character writing tasks at present, but there is a wide demand in actual spraying, engraving and other tasks, a standard Chinese character writing system for six-degree-of-freedom manipulators is designed; in addition, most industrial manipulators use Position control, the mechanical arm does not have the ability to be compliant, the control accuracy is low, and it needs repeated precise positioning by humans. A Chinese character writing system with force control is designed. First, extract the outline information of Chinese characters based on the TTF vector font library that comes with Windows, convert the pixel coordinates of Chinese characters into the position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More