

Deeply-integrated navigation method for acquisition phase of deep space exploration
A technology of integrated navigation and deep space exploration, which is applied in the direction of integrated navigators, etc., can solve the problems of high-precision autonomous navigation, low precision in the radial direction, and deviation of measurement information in the capture segment of deep space exploration, and achieve the suppression of long pulse arrival times. Effect of Doppler deviation, saving cost and time, suppressing Doppler deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
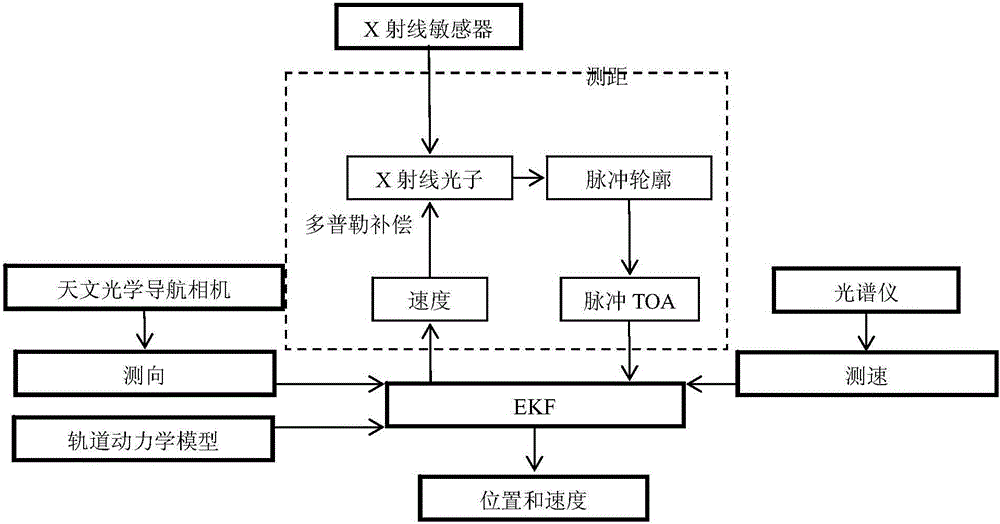
[0049] The technical scheme of the invention can adopt computer software to support the automatic operation process. The technical solution of the present invention will be described in detail below in conjunction with the drawings and embodiments. EKF, the abbreviation of Extended Kalman Filter, is the extended Kalman filter.
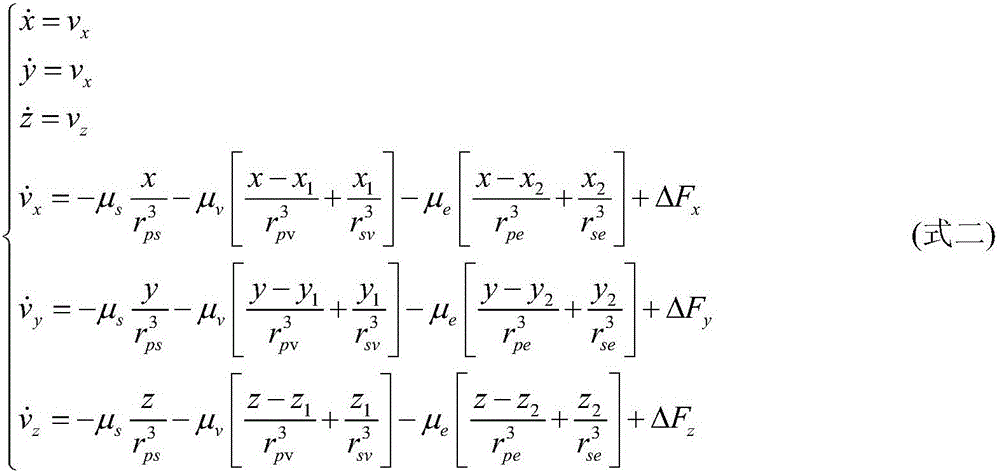
[0050] The capture segment of deep space exploration is a highly dynamic environment, and pulsar signals are greatly affected by the Doppler effect. During the pulsar observation period, the present invention uses direction finding and speed measuring information to compensate the Doppler deviation in the pulsar signal, which embodies the word "depth"; the combined navigation method includes establishing an orbital dynamics model, as well as direction finding and ranging , a velocity-navigation model, filtered using the Extended Kalman Filter. The present invention takes the Venus probe as an embodiment.
[0051] Firstly, the orbit of the Venus Expr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More