Trajectory learning controller, control system and method with initial state error correction
An error correction and controller technology, applied in the control/regulation system, two-dimensional position/channel control, non-electric variable control, etc., can solve the problem of reducing tracking accuracy, multiple prior knowledge, tracking trajectory and expected trajectory error large and other problems, to achieve the effect of simple structure, strong robustness, and low online computing burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
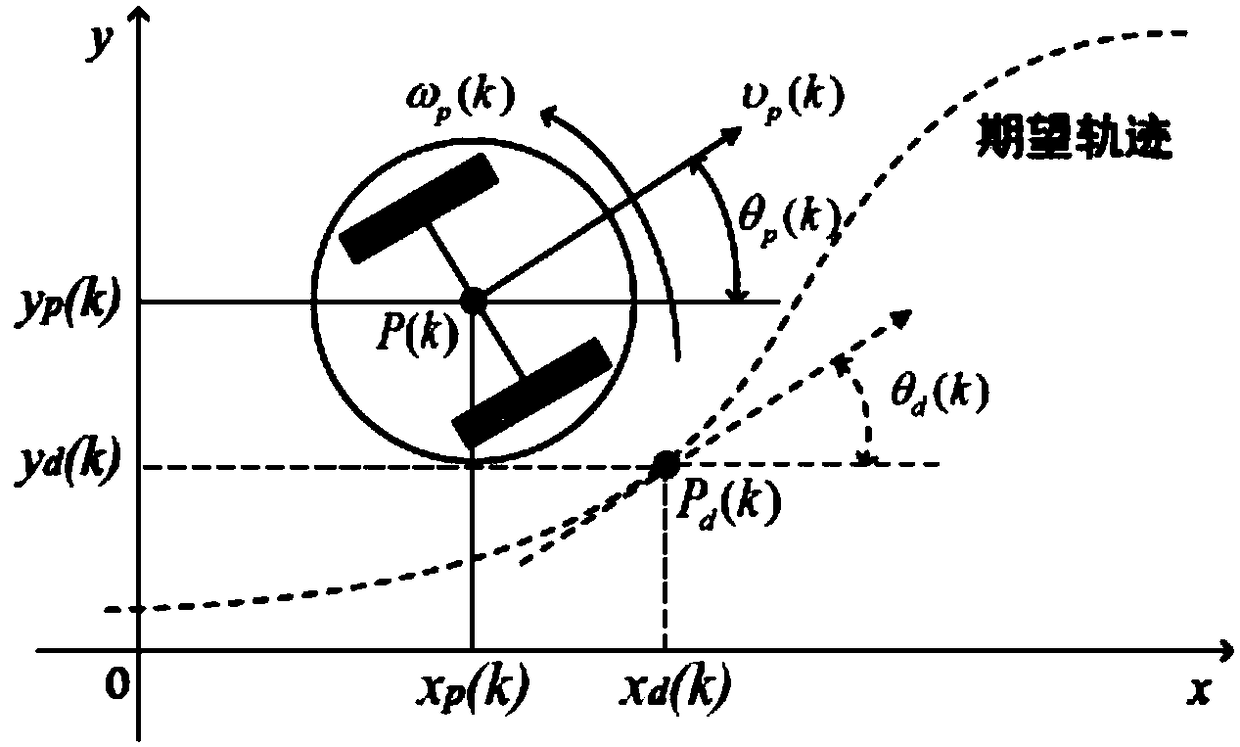
[0042] like figure 1 Shown is a schematic diagram of the trajectory tracking of a wheeled robot, which has two independent propulsion wheels on the same shaft. Point P is the center of the mobile robot, and its coordinates are (x p ,y p ), the orientation angle is θ p , when the forward direction of the robot is consistent with the direction of the positive semi-axis of the horizontal axis of the coordinate system, θ p =0. When the mobile robot moves in two-dimensional space, its movement posture is determined by [x p (k),y p (k), θ p (k)] T Description, where k represents discrete time.
[0043] Affected by incomplete constraints, the wheeled robot can only move in the direction of the drive axle, respectively, with v p (k) and ω p (k) to represent the linear velocity and angular velocity of the robot. The trajectory tracking problem of a nonholo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com