A Robot Path Tracking Algorithm Based on Potential Energy Field
A path tracking and robot technology, which is applied in the field of robot path tracking algorithm based on potential energy field, can solve the problems that the robot deviates from the preset path, the computer hardware requirements are high, and the search range cannot be controlled.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
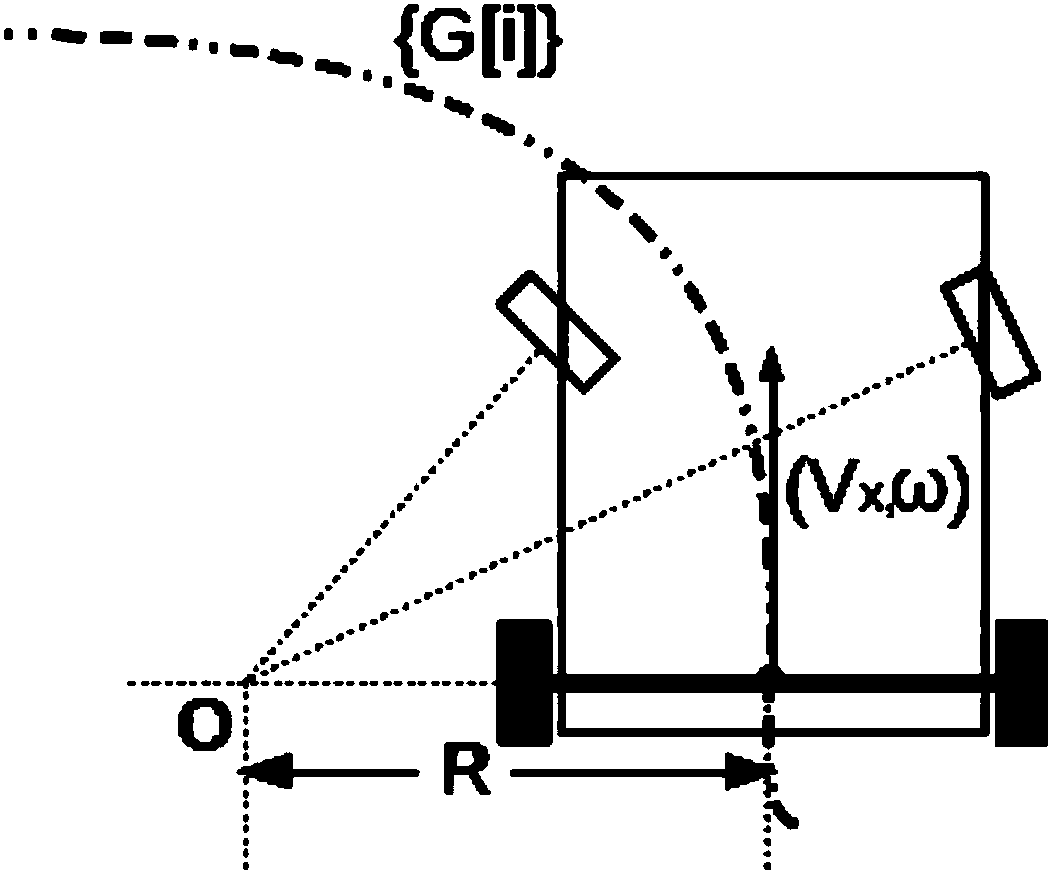
[0068] figure 1 The figure shows a typical differential drive wheel robot chassis. The two black rear wheels are driving wheels, and the hollow white front wheels are driven wheels. The dotted line is the path that the chassis travels arbitrarily. According to the basic theory of kinematics, at any moment, its speed is a combination of linear velocity Vx and angular velocity ω (Vx, ω), and there is the following conversion relationship between its angular velocity and linear velocity: Vx=R*ω, where R is the turning radius of the chassis rotation axis center relative to the vehicle's actual rotation center O, and the direction of Vx is the tangent direction of the instant path.
[0069] On the contrary, if a path {G[i]} is given for the robot to track, in order for the robot to reach the destination as soon as possible, the robot chassis should maintain the maximum reasonable linear speed at all times. Thus, a reasonable angular velocity ω=Vx / R can be calculated from the real-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com