

Unmanned aerial vehicle flight path tracking method adopting adaptive guiding lengths
A technology of self-adaptive guidance and guidance length, applied in the field of unmanned aerial vehicles, can solve the problems of easy vibration and low track tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
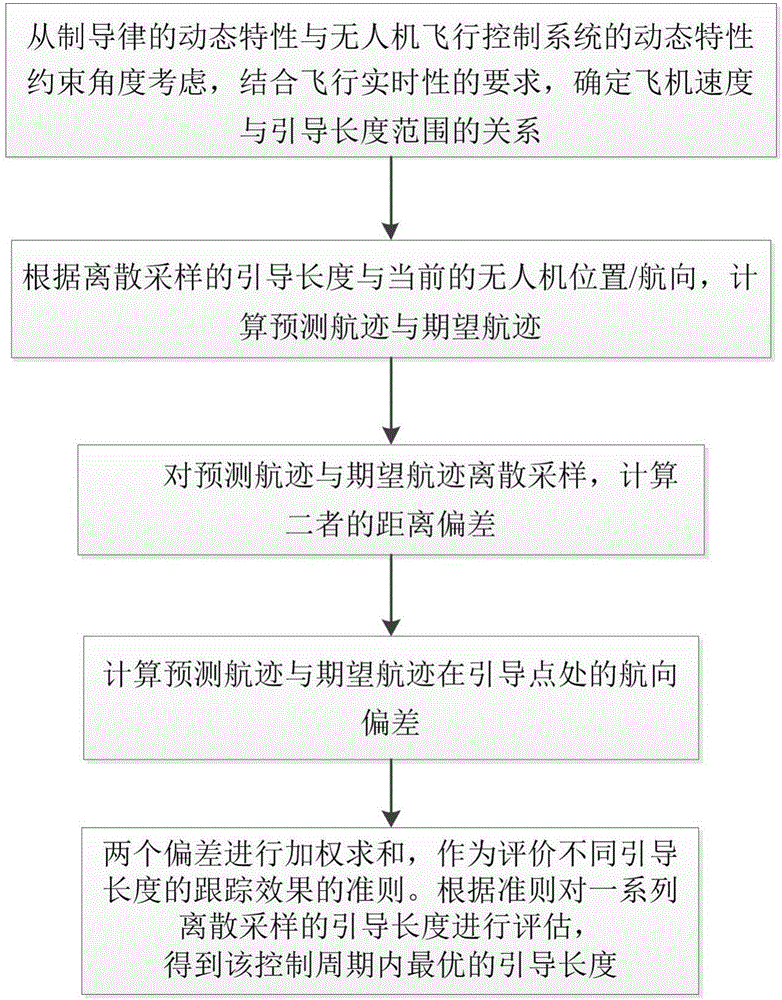
[0072] Specifically, a UAV track tracking method with adaptive guide length, comprising the following steps:
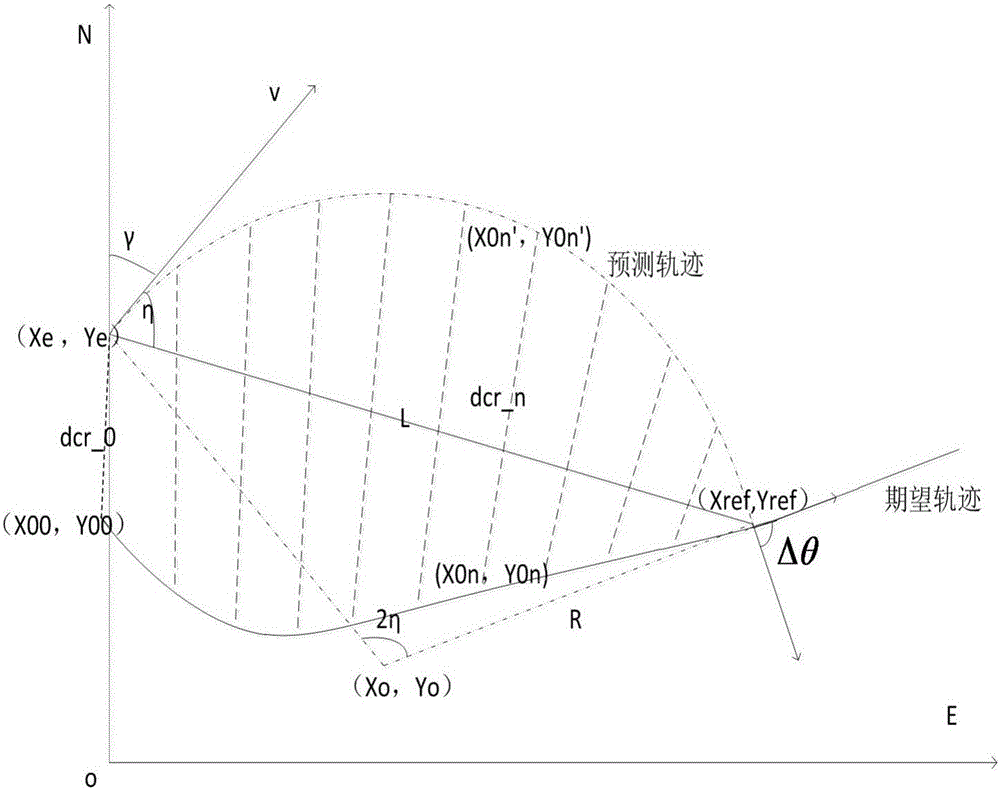
[0073] S1. According to the dynamic characteristics of the nonlinear guidance algorithm, the dynamic characteristics of the UAV aircraft control system and the real-time requirements of the control system, determine the relationship between the flight speed of the UAV and the range of guidance length in the nonlinear guidance algorithm.
[0074] S1.1, use the nonlinear guidance algorithm to track the approximate linear model of the track, and obtain the bandwidth expression of the nonlinear guidance algorithm, the expression is as follows;
[0075] ω g u i d a n c e = 2 v L
[0076] Where: v is the speed of the U...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More