

Reset control mechanism for moving arms or rotating arms of pipeline robot
A pipeline robot and reset control technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of speed overshoot, lost steps or stalled, unpredictable motor rotor position, etc., and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
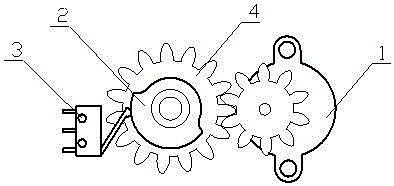
[0016] Such as figure 1 As shown, a pipeline robot moving arm or rotating arm reset control mechanism includes: a motor 1, the motor is a stepping motor, and the motor includes a transmission main shaft 4; a cam 2 is arranged on the transmission main shaft 4, and the cam 2 passes through a screw It is fixedly connected with the transmission spindle and rotates synchronously with the transmission spindle; the position signal feedback switch 3, the position signal feedback switch is a micro switch or a photoelectric switch, the position signal feedback switch 3 is set on the side of the cam 2, and it sends out according to the contact state with the cam 2 Position signal; controller, which is connected with the position signal feedback switch and the motor, the controller recei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More