

Method for increasing motion stability of link mechanism with clearance
A technology of motion stability and linkage mechanism, applied in the mechanical field, can solve the problems of not conforming to the essential dynamic characteristics of the mechanism with gaps, ignoring the elastic deformation of the contact surface, and not considering the dynamic characteristics of the contact collision of the kinematic pair gap. Simple and feasible, improve the effect of motion stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
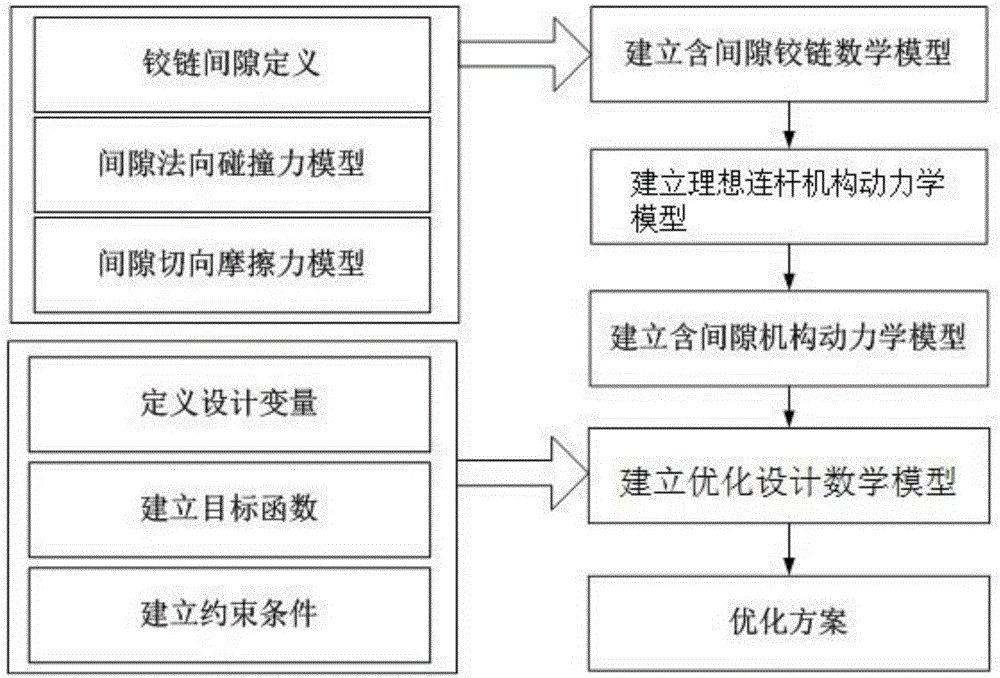
Method used
Image

Examples
Embodiment example
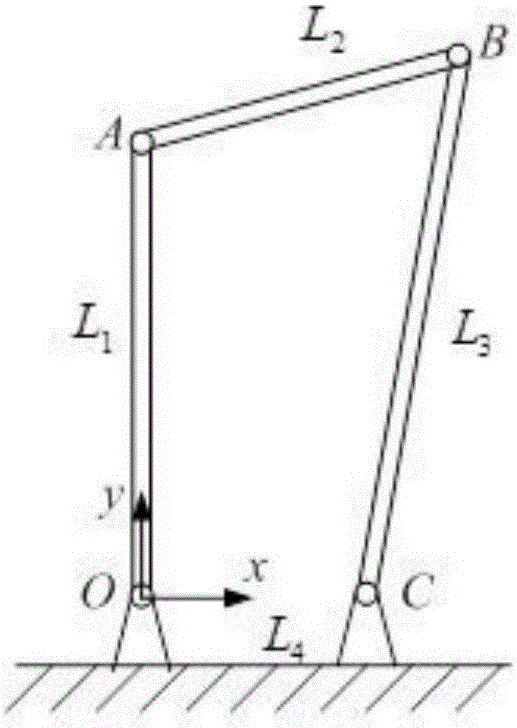
[0082] The present invention is applicable to multi-link mechanisms such as four-bar linkages, five-bar linkages, and six-bar linkages. In this embodiment, only four-bar linkages are used to further illustrate the present invention, and the present invention is not limited thereto.
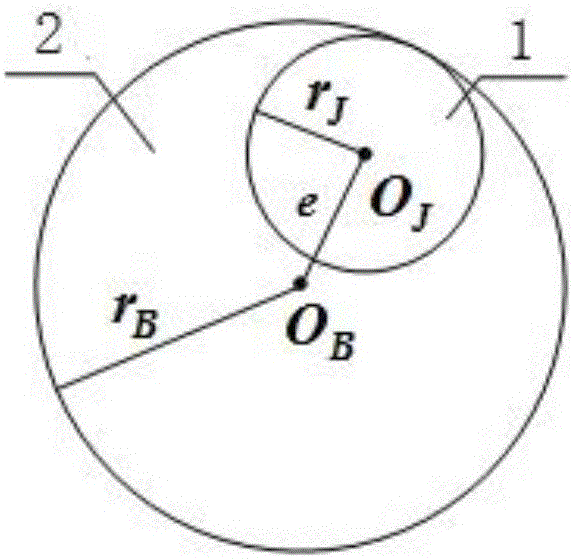
[0083] Taking the planar four-bar mechanism with clearance as the implementation object, such as figure 1 As shown, the four-bar mechanism is a planar double crank mechanism. The mechanism is composed of driving crank, connecting rod, driven crank and frame. It contains three ideal hinges and a gap hinge. The gap hinge is between the connecting rod and the driven crank, that is, there is a gap in hinge B. The optimal design of the planar four-bar mechanism considering the gap is carried out. The length of the rod is used as the design variable, and the maximum peak value of the acceleration jitter of the gap-containing mechanism is the goal. In the long run, the influence of the gap can be reduce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More