Wearable lower limb exoskeleton robot
A technology of exoskeleton robots and lower limbs, which is applied in the directions of manipulators, program-controlled manipulators, and appliances that help people walk, etc. It can solve the problems of large structure, complex structure, and difficulty in further optimizing the overall weight of the robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0065] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described with reference to the accompanying drawings.
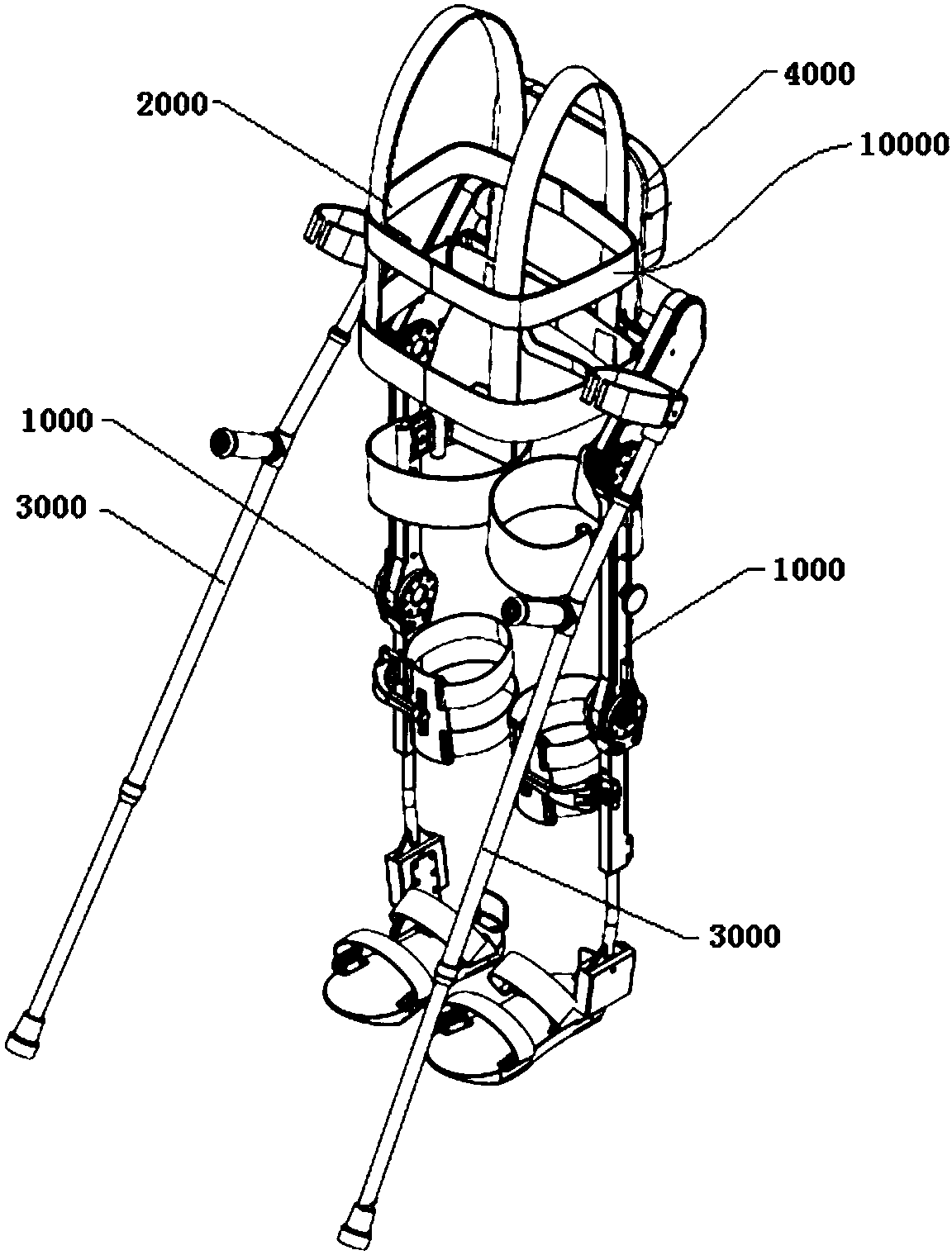
[0066] Such as figure 1 and figure 2 As shown, the present invention provides a wearable lower extremity exoskeleton robot 10000, which includes a waist and shoulder binding system 2000, a leg movement system 1000, a crutch 3000 and an electrical control box 4000. The waist and shoulder binding system 2000 is used to be worn and fixed on the upper body of the human body. Meanwhile, the waist and shoulder binding system 2000 is also fixedly connected with the leg movement system 1000 and the electrical control box 4000 . The crutches 3000 are used to assist the wearer to walk, and the wearer's left hand and right hand respectively hold a crutch 3000, and the upper part of the crutches 3000 can also be provided with a strap to ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More