

Manipulator testing platform
A test platform and manipulator technology, which is applied to mechanical measuring devices, testing of machine/structural components, and mechanical devices, etc., can solve problems such as inconvenient operation of arm joint space changes, difficulty in measuring spatial coordinate data, affecting the overall performance of the manipulator, etc. Achieve the effect of improving the operation and control of arm joint position change, improving the performance of space change, and reading quickly and accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Below with reference to the accompanying drawings, through the description of the embodiments, the specific embodiments of the present invention, such as the shape, structure, mutual position and connection relationship between the various parts, the role and working principle of the various parts, etc., will be further described. Detailed instructions:
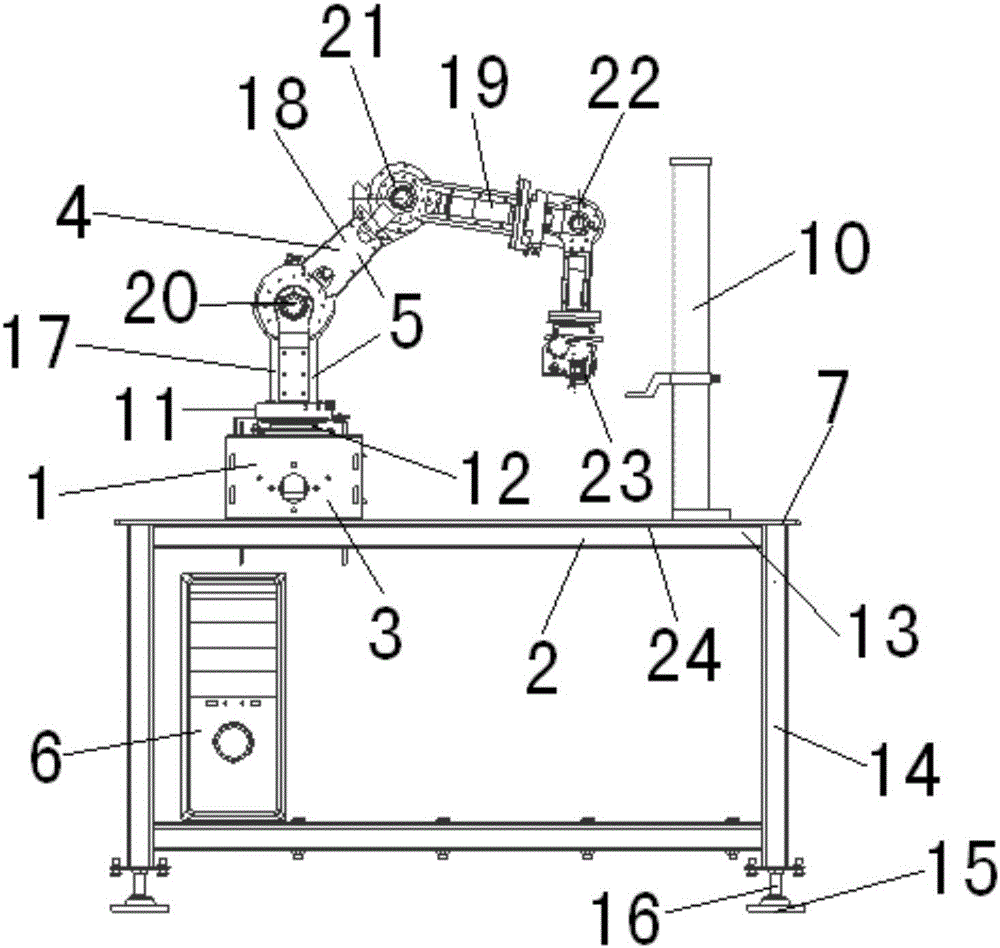
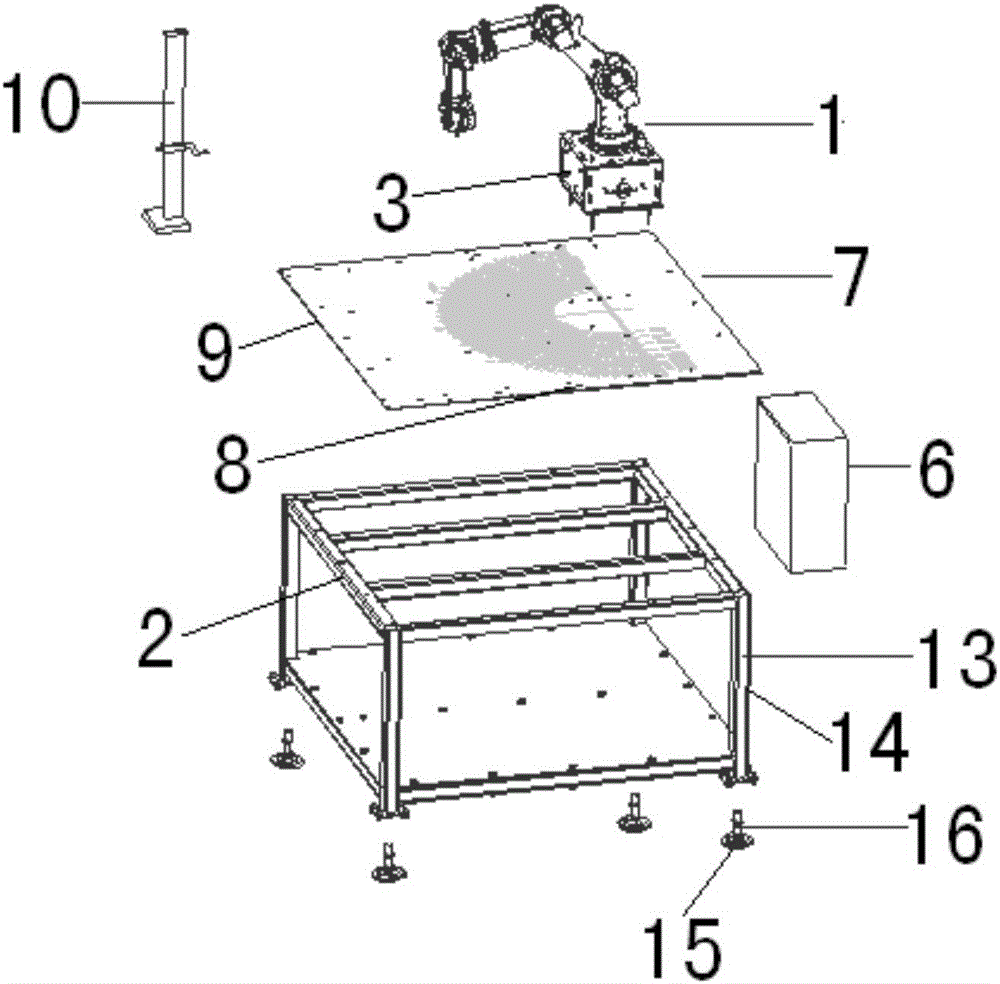
[0019] as attached figure 1 , attached figure 2 As shown, the present invention is a kind of manipulator test platform, and described manipulator test platform comprises test manipulator 1, test platform 2, and described test manipulator 1 comprises test body part 3, and test arm 4 is movably installed on test body part 3, The test arm 4 is made up of multi-section arm joints 5 that are movably connected. The test arm 4 is connected to the control host 6 that can control the movement of a plurality of arm joints 5 of the test arm. A scale plate 7 is set on the test platform 2, and an X The axial scale 8 and the Y ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More