

Intelligent capture method based on gestures and audio control
A voice control and gesture technology, applied in voice analysis, voice recognition, character and pattern recognition, etc., can solve the problems of machine work efficiency decline, material machine damage, collision, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
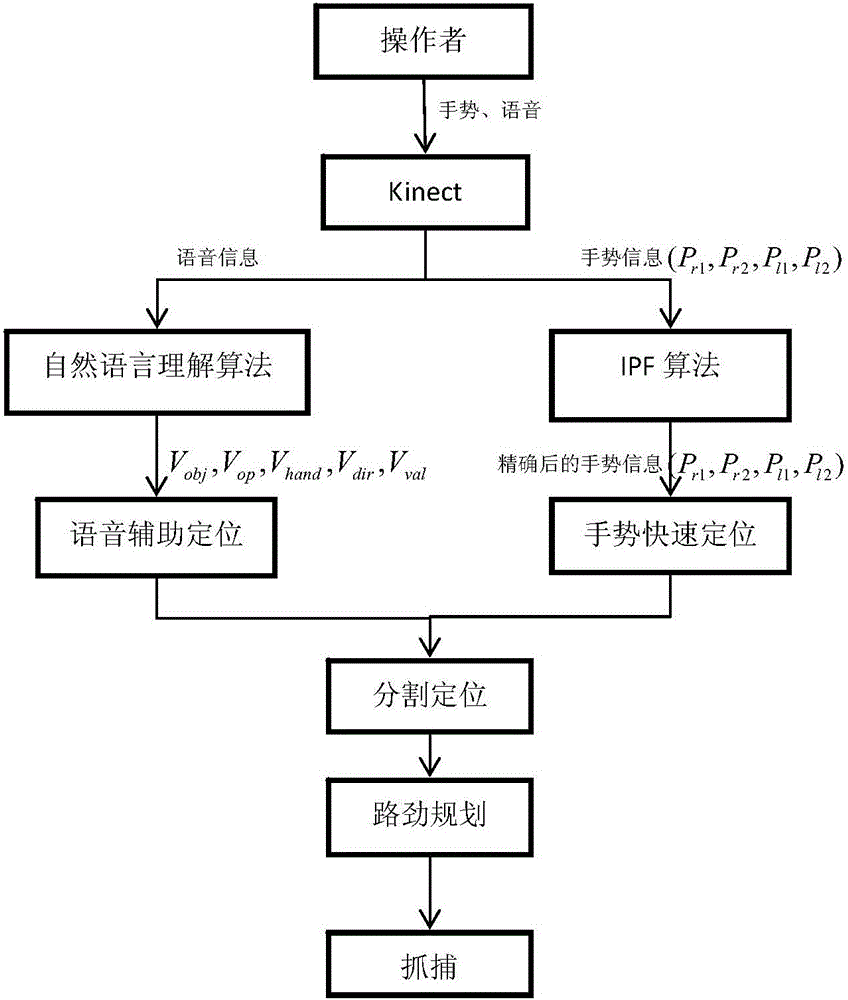
[0070] The present invention is based on gesture and voice control robot to carry out the intelligent capture method and comprises the following steps:
[0071] S1: Gesture quick positioning
[0072] S2: Auxiliary positioning and posture determination based on natural language understanding
[0073] S3: Segment and locate the target
[0074] S4: Road King Planning
[0075] The S1 step comprises the following steps:
[0076] In order to make the operator's control of the robot more flexible and convenient, and shorten the positioning time of the robot, this method adopts rapid positioning based on gestures. Using finger pointing, the robot can initially locate the target, and then finely adjust the target through voice control. As shown in Figure 1, the operator controls the robot through gestures and voice. Here, the present invention first acquires gesture information for use in subsequent positioning.
[0077] 5) Gesture acquisition
[0078] The RGB image and the depth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More