

Formalized verification method for stability of robot fractional order PID controller
A fractional order and robot technology, applied in the fields of information security and mathematics, can solve problems such as imprecise application, failure to guarantee 100% accurate analysis of the system, and life-threatening problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0039] For an underlying system of a five-DOF robot, the transfer function is:
[0040]
[0041] The applicant also proposes a fractional-order PID controller designed:
[0042]
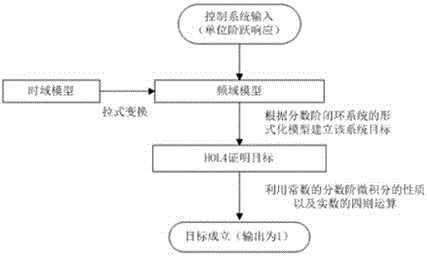
[0043] The stability of the robot under the control of fractional order PID controller has been verified by simulation method. Here, the theorem proposed by the present invention is adopted to prove logically the stability of the system under the control of the fractional-order PID controller. The time-domain model and the frequency-domain model of the fractional order system are equivalent and can be transformed into each other by Laplace transform. For this closed-loop control system, whether it can achieve steady-state output is the most basic requirement. If the system cannot reach steady-state and the robot cannot be controlled reasonably, it will cause the robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More