

Translation variable speed mechanical paw
A mechanical claw and translation technology, applied in the field of robotics, can solve the problems of clamping operation of difficult precision and fragile parts, and achieve the effect of reducing impact, improving work efficiency, and clamping stability and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
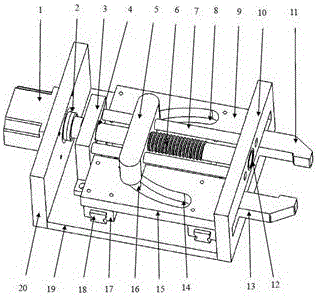
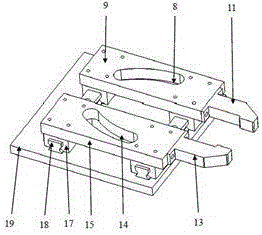
[0016] Such as figure 1 with figure 2 As shown, a translational variable speed mechanical gripper includes a stepper motor 1, a coupling 2, a transmission mechanism, a first clamping member 9, a second clamping member 15, a first clamping finger 11, and a second clamping finger 13 , base plate 19, front baffle plate 10, rear baffle plate 20, slider 17, sliding linear guide rail 18; one end of said base plate 19 is connected with front baffle plate 10 by screws, and the other end is connected with rear baffle plate 20 by screws, The stepper motor 1 is fixed on the tailgate 20, and the output shaft of the stepper motor 1 is connected with the transmission mechanism through a shaft coupling 2; the sliding linear guide rail 18 is provided with two, which are fixed on the base plate 19 in parallel, so that There are four sliders...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More