

Magnetic measurement system
A measurement and magnetic field technology, which is applied in the field of magnetic measurement system, can solve the problems that the data is prone to errors and the magnetic field cannot be measured with good accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
[0117]
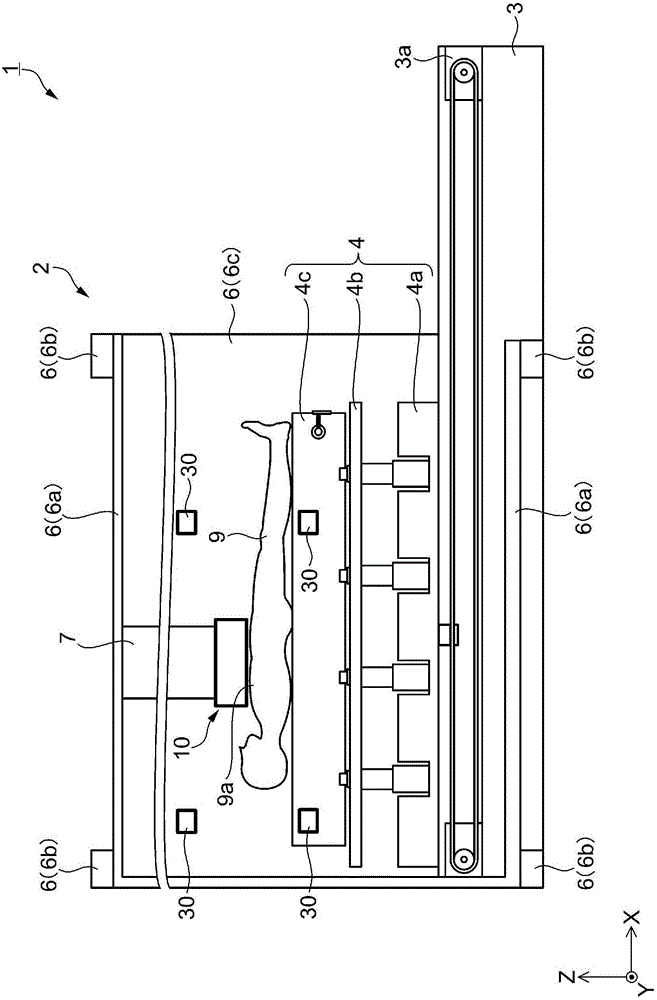
[0118] First, a configuration example of the magnetic measurement system according to the first embodiment will be described. figure 1 It is a schematic side view showing the configuration of an example of the magnetic measurement system according to the first embodiment. figure 1 The illustrated magnetic measurement system 1 is a system for measuring the cardiac magnetic field emitted from the heart of a subject (living body) 9 as a measurement target. Such as figure 1 As shown, the magnetic measurement system 1 includes a magnetic heart sensor 10 as a first magnetic sensor, a noise magnetic sensor 30 as a second magnetic sensor, and a magnetic measurement device 2 as a processing device.
[0119] The magnetic sensor 10 is a sensor for measuring a weak first magnetic field such as magnetism and brain magnetism, and a second magnetic field such as an external magnetic field (magnetic noise). Wait and use. The noise magnetic sensor 30 is a sensor that measures a s...
Embodiment 1-1
[0242] Figure 4 with Figure 5 It is an explanatory diagram of the arrangement of the noise magnetic sensor according to the embodiment 1-1. In detail, Figure 4 (a) is a stereogram, Figure 4 (b) is from Figure 4 A plan view viewed from the +X direction side of (a). Figure 5 (a) is from Figure 4 A plan view viewed from the +Y direction side of (a), Figure 5 (b) is from Figure 4 (a) A plan view viewed from the +Z direction side.
[0243] exist Figure 4 with Figure 5 Among them, in order to identify the eight noise magnetic sensors 30 individually, the first to eighth are called noise magnetic sensors 31 , 32 , 33 , 34 , 35 , 36 , 37 , and 38 , respectively. Moreover, when collectively referring to the above-mentioned noise magnetic sensors 31 , 32 , 33 , 34 , 35 , 36 , 37 , and 38 , they are called noise magnetic sensors 30 .
[0244] In the magnetic measuring system 1, four sensors of noise magnetic sensors 31, 33, 36, and 38 are attached to the main body 6...
Embodiment 1-2
[0261] In embodiment 1-2, since the positional relationship between the eight noise magnetic sensors 30 and the magnetic sensor 10 is the same as in embodiment 1-1, the illustration is omitted, and the most preferred cuboid 30a is L 1 =L 2 =L 3 = cuboid 30a of L. That is, the rectangular parallelepiped 30a is a cube whose one side has a length of 2L. The position vector r of the noise magnetic sensor 30 arranged at each vertex of such a cube whose length on one side is 2L k (magnetic sensor position r k ) is represented by Mathematical Formula 41.
[0262] [mathematical formula 41]
[0263]
[0264] When eight noise magnetic sensors 30 are arranged in this way, the magnetic sensor term matrix P (third matrix P) is represented by 1, L, and -L as shown in Mathematical Expression 42, and the calculation becomes simple.
[0265] [mathematical formula 42]
[0266] P = 1 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More