

Four-wheel independent driving electric car course tracking control method
A four-wheel independent drive, electric vehicle technology, applied in non-electric variable control, two-dimensional position/navigation control, vehicle position/route/altitude control, etc. The problem of poor interference ability, etc., achieves the effect of low dependence on the accurate model of the algorithm, improved dynamic performance, and strong anti-interference ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0048] Example: see Figure 1-Figure 5 .
[0049] figure 1 It is a structural block diagram of the four-wheel independently driven electric vehicle heading tracking control system of the present invention;
[0050]In this example, if figure 1 As shown, the control algorithm adopts a double-layer control structure, the upper layer is the direct yaw moment setting layer, and the lower layer is the torque distribution layer. In the direct yaw moment formulation layer, the real-time value ψ of vehicle heading angle and the real-time value ω of vehicle yaw angular velocity are obtained from the four-wheel independent drive electric vehicle vehicle model r ; Set the heading angle of the vehicle to be tracked ψ ref And the real-time value of the vehicle heading angle ψ is used as the input of the designed active disturbance rejection controller ADRC1 to calculate the intermediate value of the yaw rate ω rd . The middle value of the yaw rate ω rd As the expected value of the ya...
example
[0085] The total mass m=1650kg, the wheelbase L=3.05m, the distance from the center of mass to the front axle a=1.40m, the distance from the center of mass to the rear axle b=1.65m, the cornering stiffness of the front wheel C af =-40500, rear wheel cornering stiffness C ar =-40500 four-wheel drive electric vehicle, when verifying that the vehicle speed is 70km / h, verify the tracking characteristics and anti-disturbance characteristics of the heading tracking controller designed by the present invention.
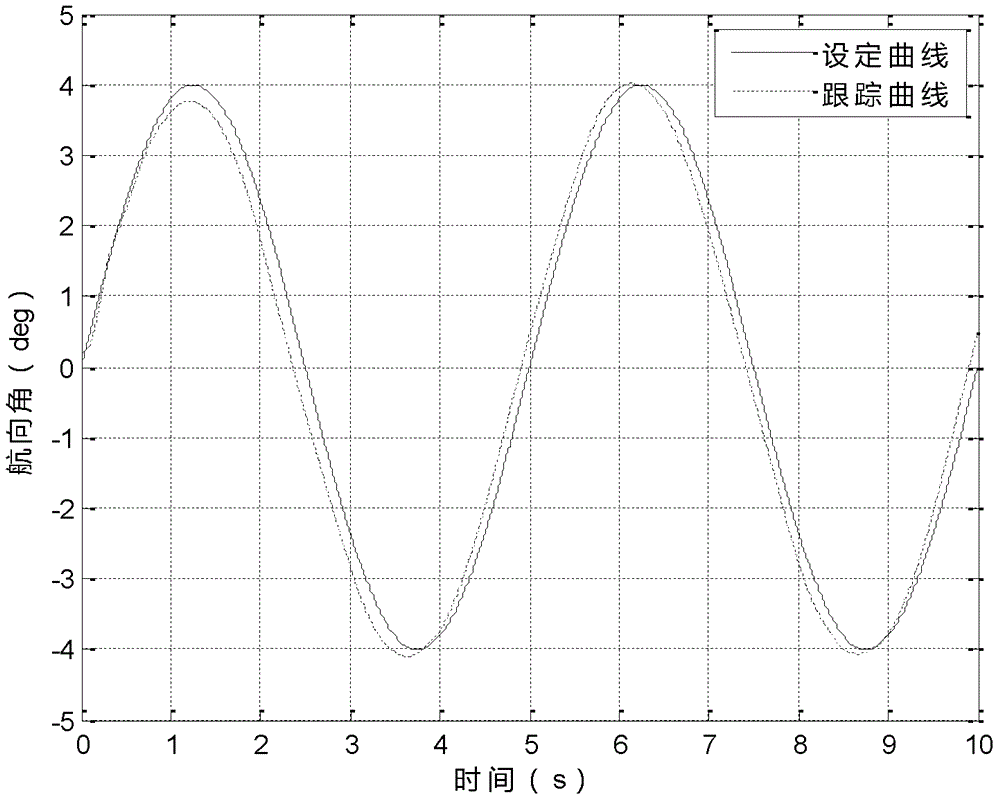
[0086] figure 2 It is a comparison chart of the simulation results of the heading angle during the tracking ability test;
[0087] In this example, if figure 2 As shown, the solid line represents the setting curve that needs to be tracked, which is set as a sinusoidal signal, and the dotted line is the real-time tracking effect of the heading angle after adopting the heading tracking control algorithm designed by the present invention. It can be seen that the gap between...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More