

A Control Method of Two-wheeled Self-balancing Robot Based on Some Known Parameters
A control method and self-balancing technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of unconsidered, controller output influence, system instability, etc., to improve performance and maintain stable control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
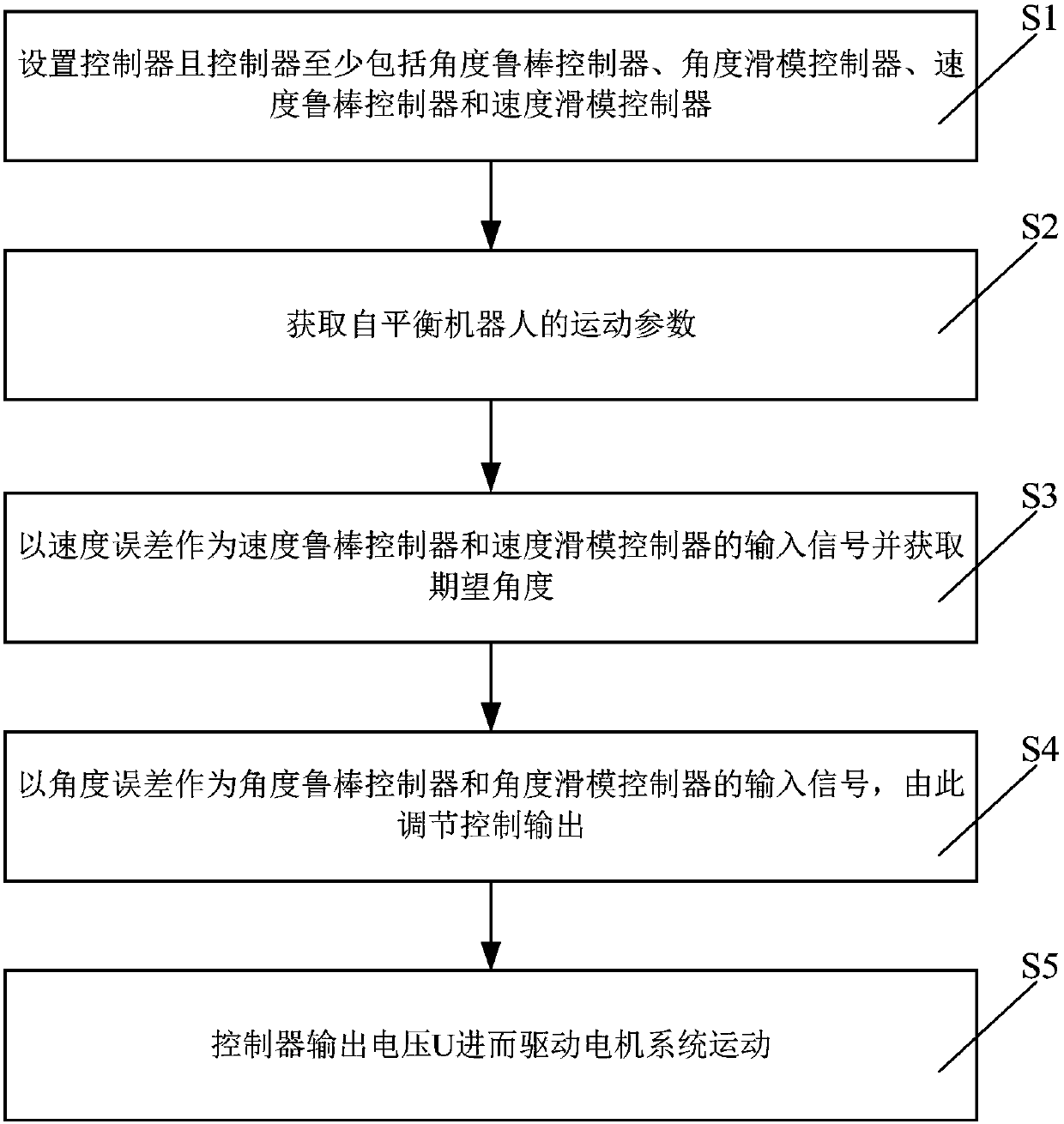
[0045] see figure 1 , is shown as a flow chart of a two-wheel self-balancing robot control method based on some known parameters of the present invention, including the following steps:
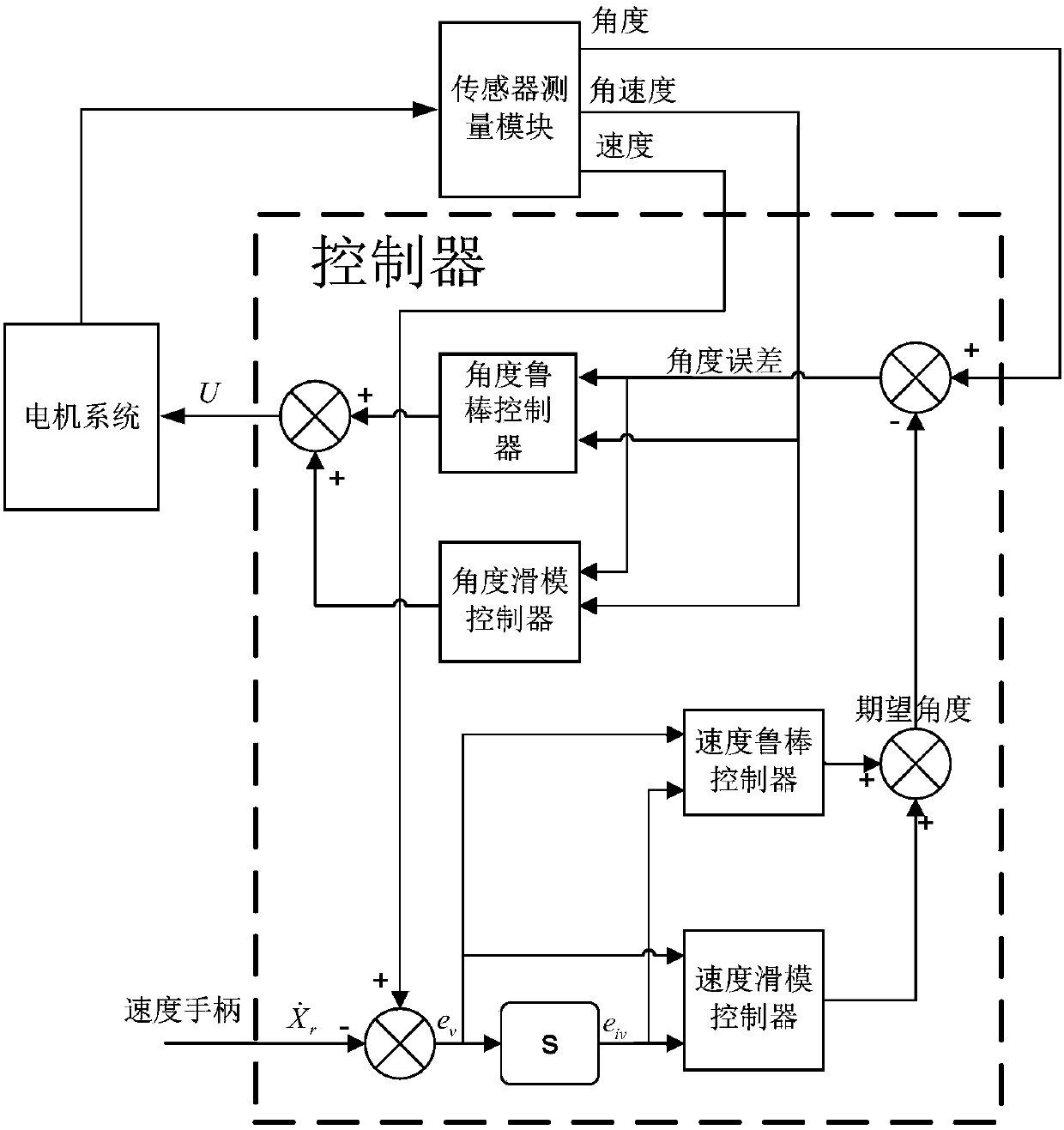
[0046] Step S1: Set up the controller in the main control chip, see figure 2 , shows the functional block diagram of the two-wheel self-balancing robot controller of the present invention, the controller at least includes an angle robust controller, an angle sliding mode controller, a speed robust controller and a speed sliding mode controller;
[0047] Step S2: Obtain the motion parameters of the self-balancing robot, the motion parameters include at least the desired speed actual speed Actual angle θ and angular velocity
[0048] Step S3: at the desired speed and actual speed The speed error e v As the input signal of the speed robust controller and the speed sliding mode controller, obtain the desired angle θ r ;
[0049] Step S4: At the desired angle θ r and the angle erro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More