

Blockage processing method and device for intelligent robot
A technology of intelligent robots and processing methods, applied in the field of robotics, can solve the problems of intelligent robot systems taking a long time and detrimental to the user experience of robots, etc., and achieve the effect of strong companionship and friendly interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
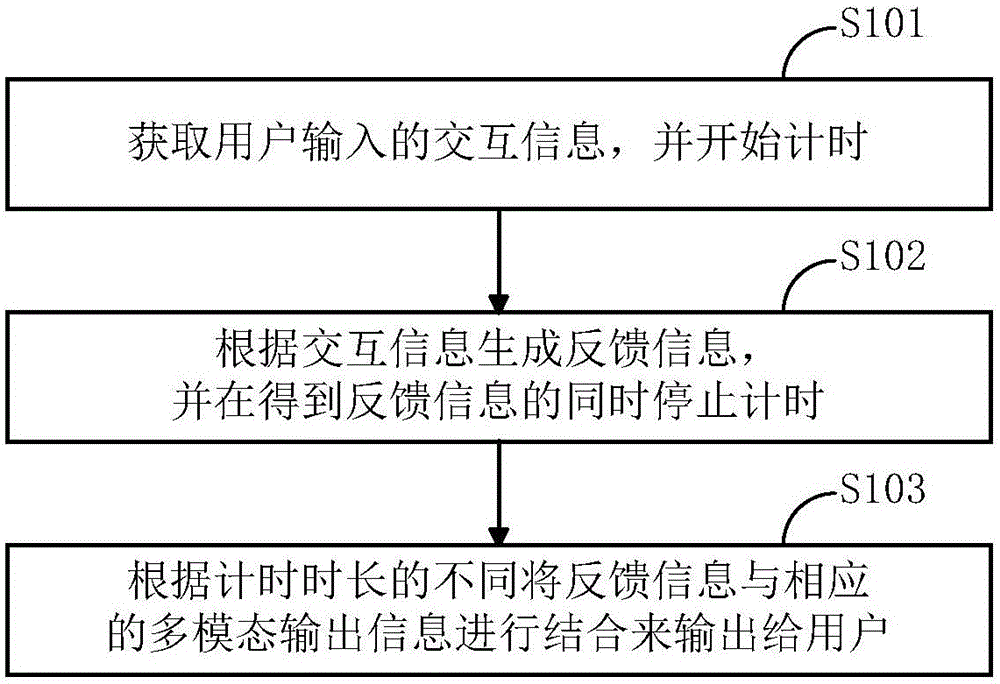
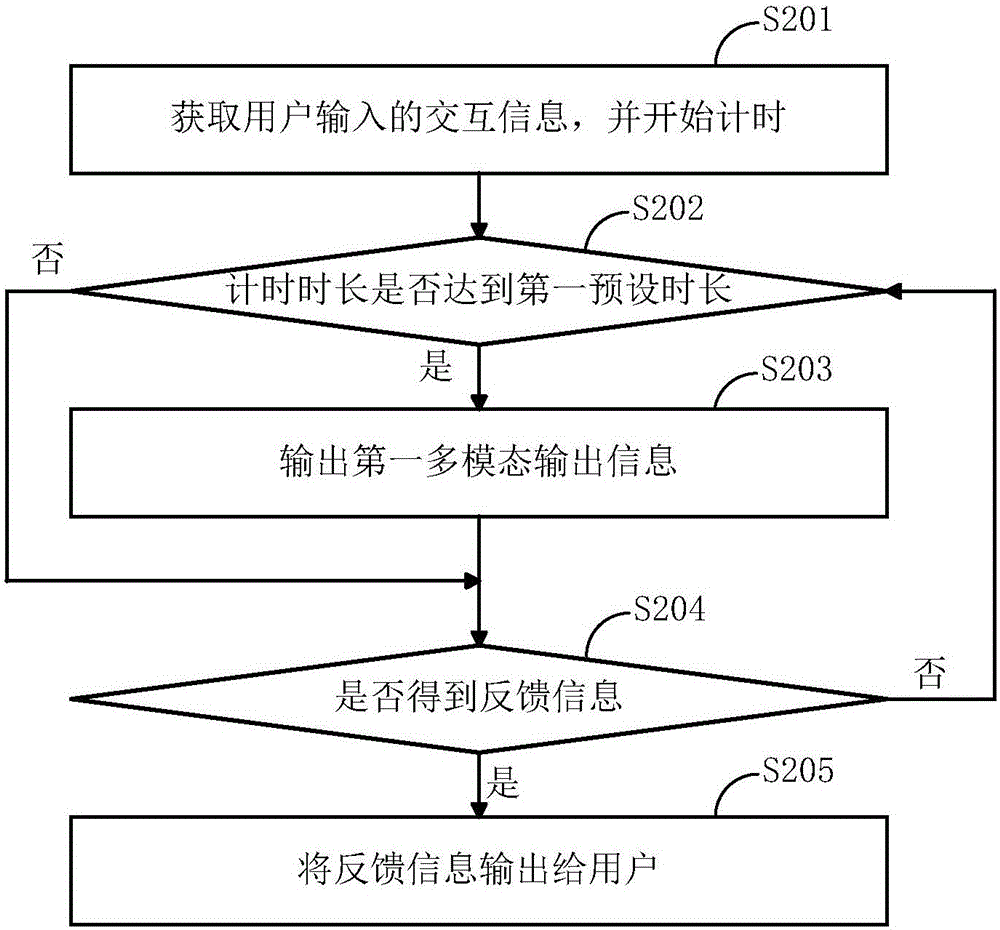
[0038] figure 2 A flow chart of the implementation of the stuck processing method for an intelligent robot provided in this embodiment is shown.
[0039] Such as figure 2 As shown, the freeze handling method provided by this embodiment first obtains the interaction information input by the user in step S201, and starts timing. In this embodiment, the principle and process of acquiring interaction information and timing in this method are similar to those involved in step S101 above, so details are not repeated here.
[0040] After the timing starts, the method will judge whether the timing duration reaches the first preset duration in step S202. If the timing duration does not reach the first preset duration, then the method will execute step S204 to determine whether to obtain feedback information. If the timing duration does not reach the first preset duration, and the method has obtained feedback information, then the method will execute step S205 to output the obtaine...
Embodiment 2
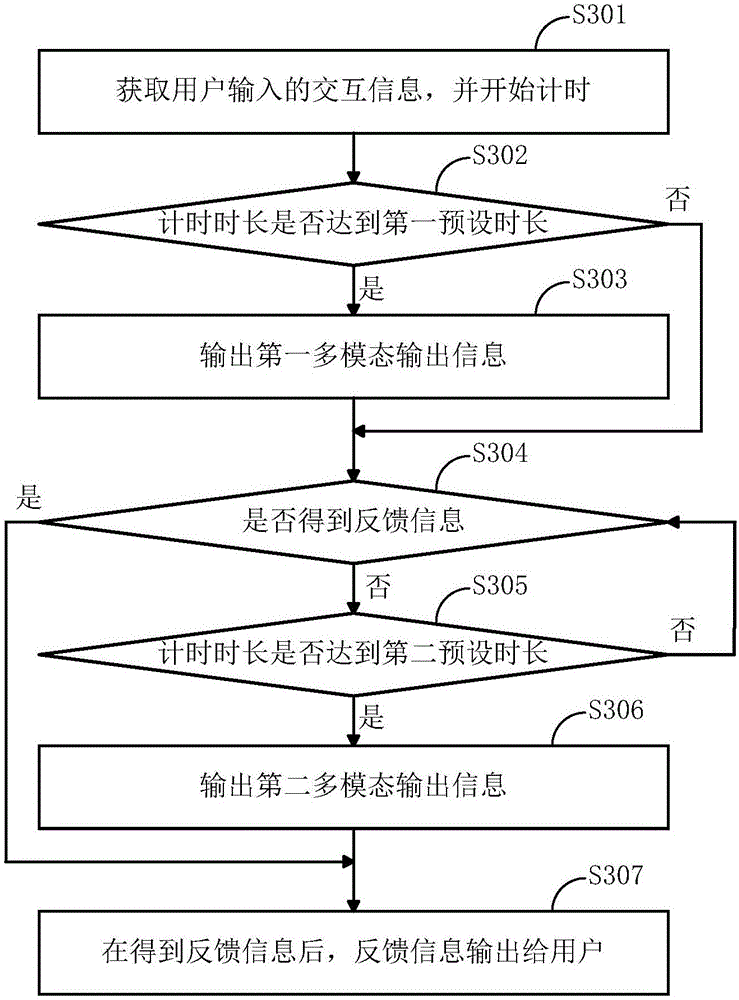
[0046] image 3 A flow chart of the implementation of the stuck processing method for an intelligent robot provided in this embodiment is shown.
[0047] Such as image 3 As shown, the freeze handling method provided by this embodiment first obtains the interaction information input by the user in step S301, and starts timing. During the timing process, the method also continuously judges whether the timing duration reaches the first preset duration in step S302. Wherein, if the timing duration reaches the first preset duration, then the method executes step S303 to output the first multimodal output information; if the timing duration has not reached the first preset duration, then the method executes step S304 to judge whether Get feedback. It should be pointed out that, if the timing duration reaches the first preset duration, the method will also execute step S304 after outputting the first multimodal output information to further determine whether feedback information ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More