

Moment distribution method for self-adaptive cruise control system of four-wheeled independent drive electric automobile
A four-wheel independent drive, adaptive cruise technology, applied in electric vehicles, control drives, control devices, etc., can solve the problem that the adaptive cruise control system cannot be directly applied to four-wheel independent drive electric vehicles.
Inactive Publication Date: 2016-12-07
DALIAN UNIV OF TECH
View PDF4 Cites 38 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] In order to solve the above-mentioned problems in the prior art, the present invention is to design a torque distribution method for the adaptive cruise control system of four-wheel independent drive electric vehicles, which can solve the problem that the traditional adaptive cruise control system cannot be directly applied to four-wheel independent drive electric vehicles. It can improve the practicability of adaptive cruise control and meet the safety, comfort and economy requirements required by drivers.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0144] The specific implementation mode of the present invention is according to figure 1 The flow shown and the steps in the Summary of the Invention are implemented. The present invention is not limited to this embodiment, and any equivalent ideas or changes within the technical scope disclosed in the present invention are listed in the protection scope of the present invention.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
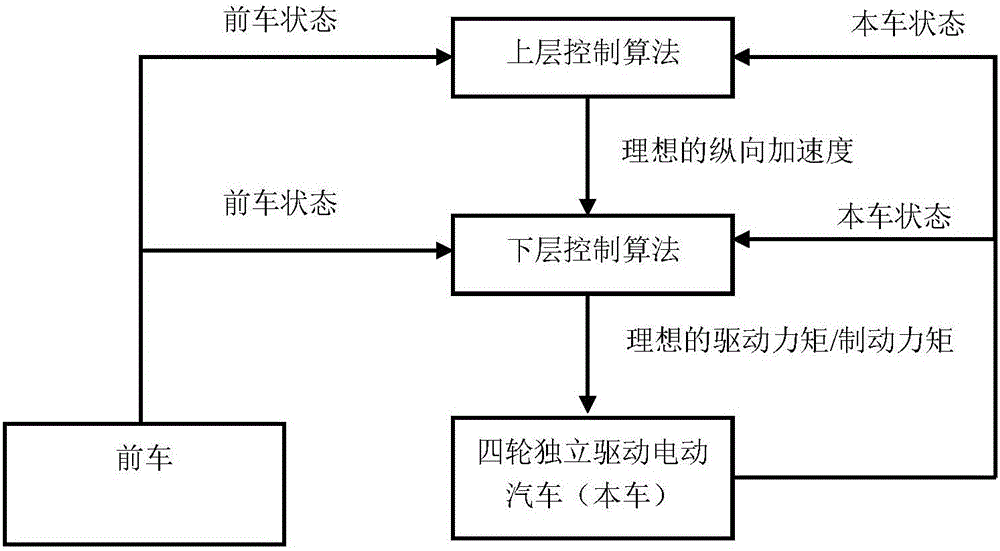
The invention discloses a moment distribution method for a self-adaptive cruise control system of a four-wheeled independent drive electric automobile. An ideal acceleration command is calculated through an upper layer control method and input in a lower layer control method, the lower layer control method is used for calculating the ideal drive moment according to the ideal acceleration command calculated through the upper layer control method and distributing the moment to four wheels, and the problem that a traditional self-adaptive cruise control system cannot be directly applied to the four-wheeled independent drive electric automobile is solved. Smoothly-restrained model prediction control is adopted in the upper layer control method, the practicality of the self-adaptive cruise control system is improved, and the requirements for safety, comfort and economical efficiency of a driver are met. Fuzzy control is adopted in the lower layer control method, so that the ideal longitudinal moment is obtained, the moment is distributed to the four wheels according to the vertical load proportions, and the robustness and practicality of the self-adaptive cruise control system of the four-wheeled independent drive electric automobile are improved while the dynamic quality of the four-wheeled independent drive electric automobile is guaranteed.
Description
technical field [0001] The invention belongs to the field of safety auxiliary driving and intelligent control, and relates to a design method of an adaptive cruise control system of a four-wheel independently driven electric vehicle, in particular to a torque distribution method of the adaptive cruise control system of a four-wheel independently driven electric vehicle. Background technique [0002] With the increasingly serious energy problem, the development of electric vehicles has attracted more and more attention. Four-wheel independent drive electric vehicle refers to a vehicle that installs four motors inside or near the four wheel hubs. Compared with traditional vehicles, four-wheel independent drive electric vehicles have great technical advantages: four motors can be controlled independently , and the response speed of the motor is extremely fast, so for the special drive form of four-wheel independent drive electric vehicles, more complex control methods can be us...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B60W30/16B60W40/107B60W10/08B60L15/32
CPCB60L15/32B60L2240/423B60L2260/48B60W10/08B60W30/16B60W40/107B60W2050/0003B60W2554/80B60W2710/083
Inventor郭烈林肖乔彦夫岳明李琳辉杨彪
OwnerDALIAN UNIV OF TECH