Four-rotor wall climbing robot capable of climbing over normal plane
A four-rotor and robot technology, applied in the field of robots, can solve the problems of demanding start-up requirements, inconvenient users, and difficulty in climbing over the normal surface, etc., and achieve the effect of small steering space and good use effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
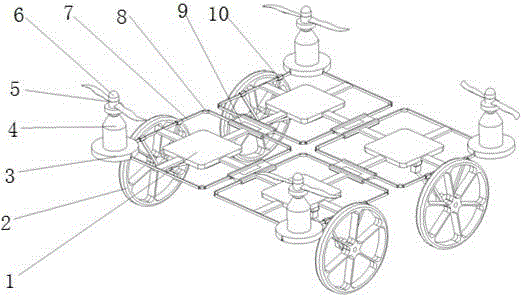
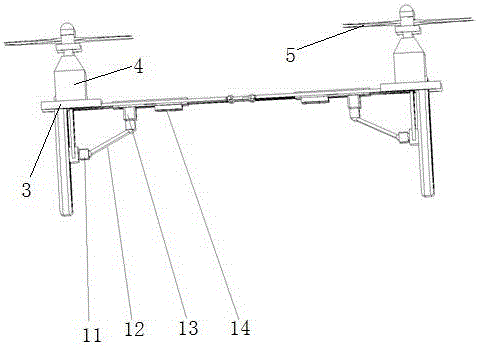
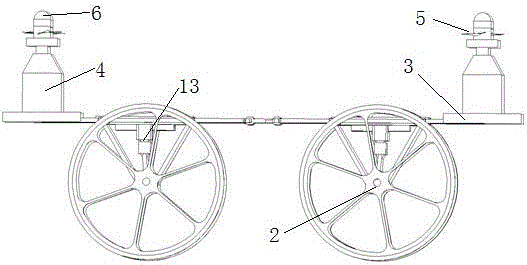
[0015] see Figure 1-4 , a four-rotor wall-climbing robot that can climb over the normal plane, including a support block 1, a wheel 2, a rotor 5, a support body 7, a half shaft 12, a motor 13, a battery box and a control element 14, the support block 1 and The number of support bodies 7 is four and a support block 1 is installed in the middle of each support body 7, and the support bodies 7 are connected by a rotating connector 9. A wheel bracket 10 is installed on one side of the support body 7, and the wheel 2 is installed. In the wheel bracket 10, a corner of the support body 7 is provided with a rotor bracket 3, and the rotor 5 is installed on the rotor bracket 3 through the motor housing 4, and a rotor cover 6 is installed on the upper end of the rotor 5, and the lower end of each support block 1 is A motor 13 and a control element 14 are in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More