

A method and device for calculating human joint angles
A human body joint and solving technology, applied in the direction of calculation, computer parts, input/output of user/computer interaction, etc., can solve the problem of different results, high requirements for initial wearing position and direction consistency, and cannot be directly controlled Robots and other problems, to achieve the effect of improving accuracy and realizing full pose solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the objectives, technical solutions, and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be described clearly and completely in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of the embodiments of the present invention, not all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
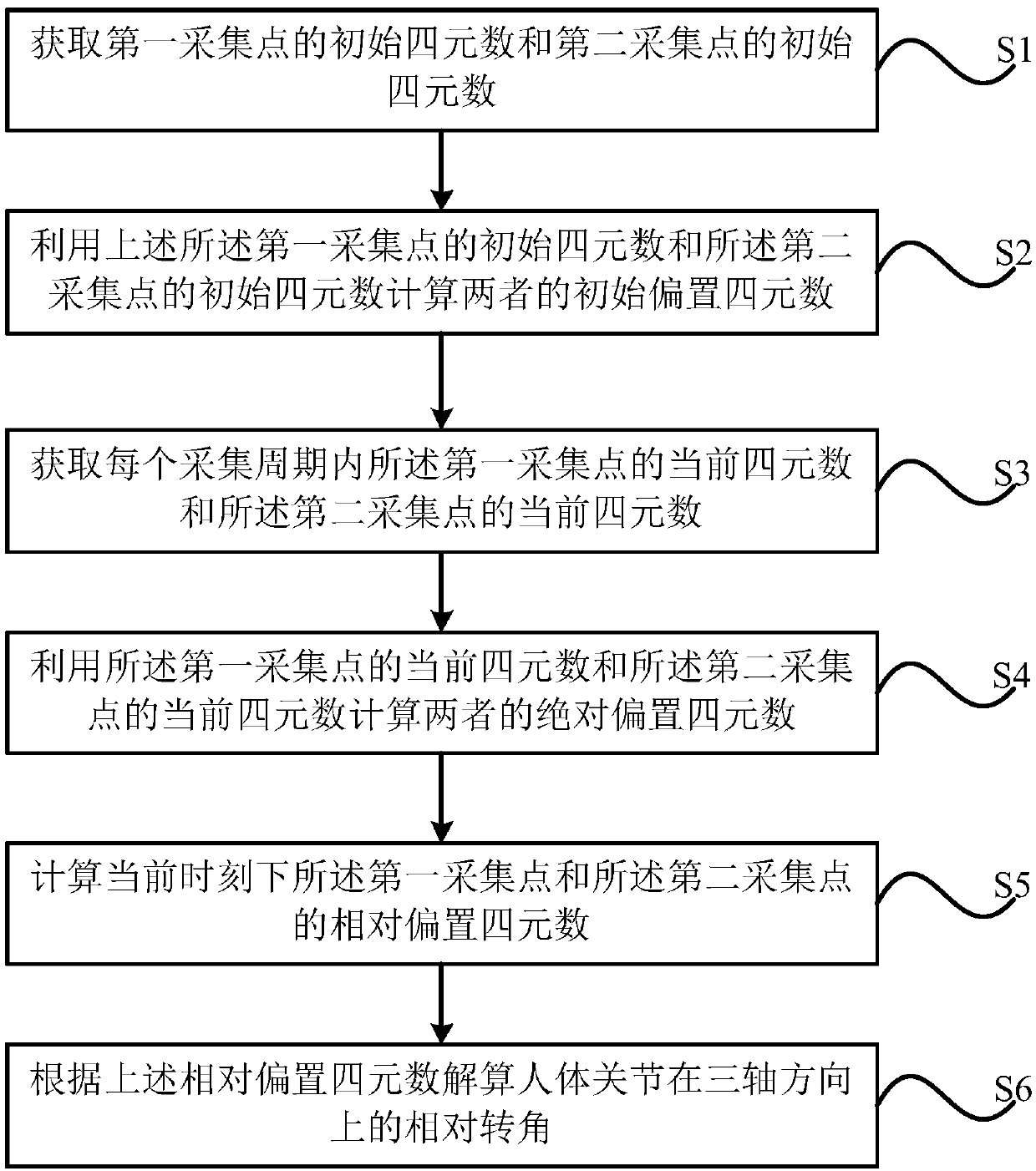
[0047] In the first aspect, the present invention provides a method for calculating the angle of human joints, such as figure 1 As shown, the method includes:
[0048] S1. Obtain the initial quaternion of the first collection point and the initial quaternion of the second collection point;
[0049] S2, using the initial quaternion of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More