

Optimization method of smooth and steady gliding trajectory of hypersonic flight vehicle
A technology of gliding trajectory and optimization method, which is applied in the field of aerospace flight, can solve problems such as difficult to realize the optimization of smooth gliding trajectory in all states, achieve the effects of suppressing trajectory jumping, improving optimization efficiency, and reducing the difficulty of numerical solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
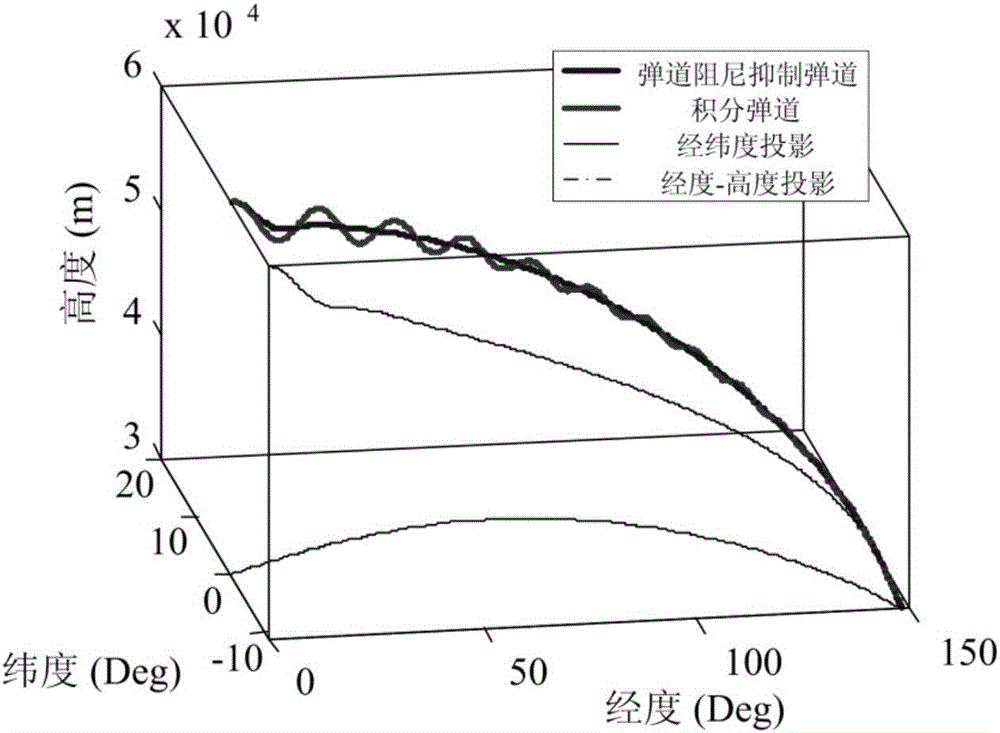
[0111] Example 1 verifies the effectiveness of the expanded ballistic damping technology
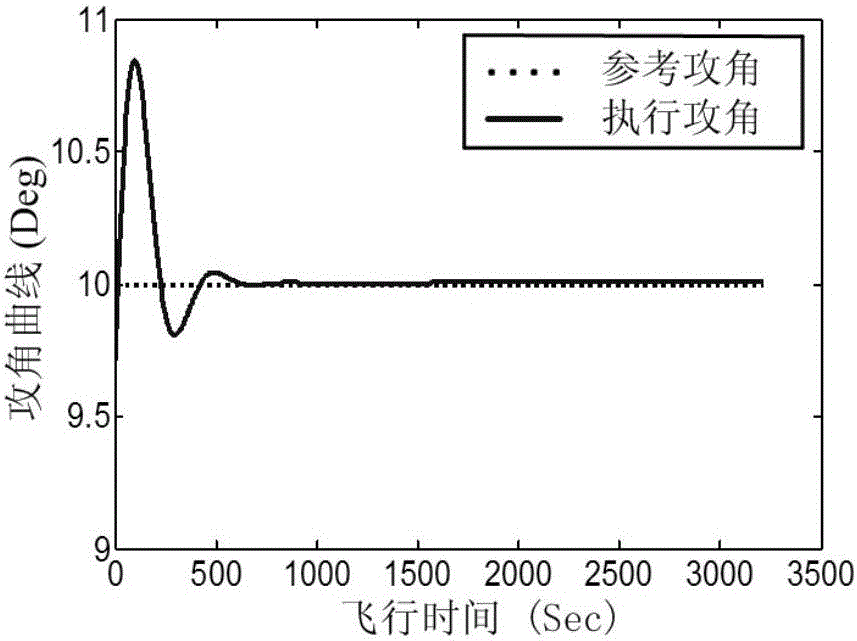
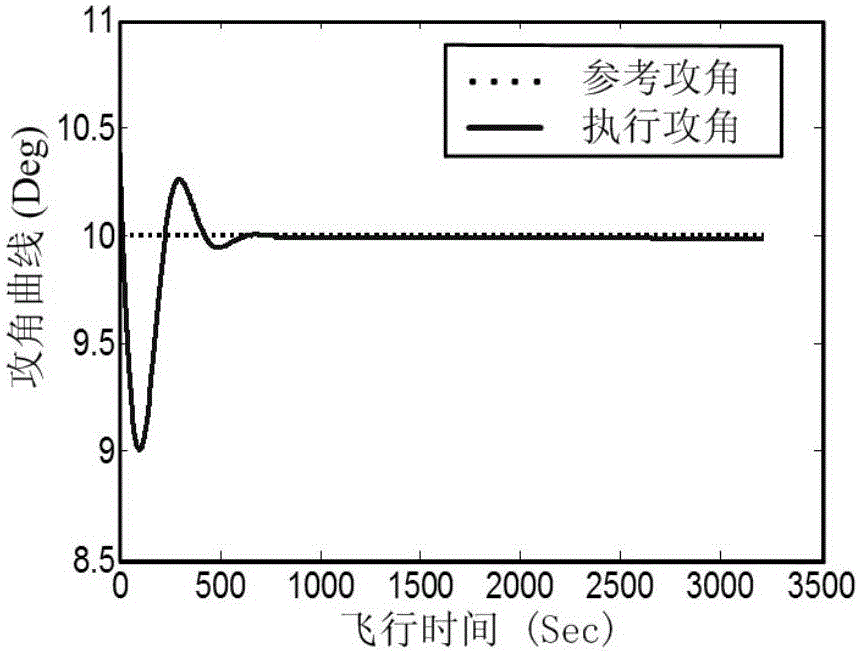
[0112] CAV-H is selected as the re-entry vehicle model, the aerodynamic parameters and performance parameters are as described above, the angle of attack is selected to be 10 degrees close to the maximum lift-to-drag ratio, and the roll angle is also selected to be 10 degrees. In equation (10), it is necessary to suppress the formation of the trajectory Angle of attack α 2 and roll angle σ 2 It can be calculated according to the following formula:
[0113]
[0114]
[0115] In finding the angle of attack α 2 When , choose to use the first formula in equation (10) for calculation because the roll angle range of the aircraft is [-60°, 60°]; There will be strange phenomena in the corners, which can be avoided by using the first formula.
[0116] The initial state quantity of the aircraft is: h 0 =60000m; θ 0 = 0deg; V 0 =7100m / s; γ 0 = 0deg; ψ 0 =90 deg. All simulations ar...
Embodiment 2
[0118] Embodiment 2 does not consider the smooth gliding ballistic optimization of roll reversal
[0119] Use the hp adaptive Radau pseudospectral method to optimize the trajectory of the hypersonic reentry vehicle using ballistic suppression technology. During the optimization process, some related parameters are set as mentioned above, and the dynamic constraints are formed by Equation (11) For the smooth glide reentry dynamics model, the derivatives of the angle of attack and the roll angle with respect to time are used as control variables, and in order to obtain a smooth enough smooth glide trajectory, the following performance indicators (15) are selected.
[0120]
[0121] Among them, K 1 and K 2 are the weighting coefficients of the elements in the performance index, and the constraint relationship between the actual attack angle and roll angle is shown in equations (16) and (17).
[0122]
[0123]
[0124] Different process constraints and terminal constrai...
Embodiment 3
[0133] Example 3. Optimization of smooth glide trajectory considering roll reversal
[0134] Generally speaking, the goal of smooth glide trajectory optimization is to provide practical reference trajectory information for traditional tracking guidance laws (such as LQR linear quadratic regulation tracking), in fact, these guidance laws eliminate the lateral presence of The error of , only tracks the state on the longitudinal profile. In order to provide a feasible reference trajectory, this embodiment will study the optimization of a smooth glide trajectory considering one roll reversal. When adding roll reversal to the optimization process, it greatly increases the feasibility of reentry flight trajectories. All simulation settings are the same as in Example 2, and the initial condition is: h 0 =70000m, θ 0 = 0deg, v 0 =7100m / s, γ 0 = 0deg, ψ 0 =70deg. In addition, different target positions will be used to verify the adaptability of the smooth glide trajectory opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More