

Road detection algorithm of fusion of area and edge information
A technology of road detection and edge information, applied in computing, computer components, character and pattern recognition, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0092] As shown in the figure, the road detection algorithm for fusing region and edge information provided by this embodiment includes the following steps:
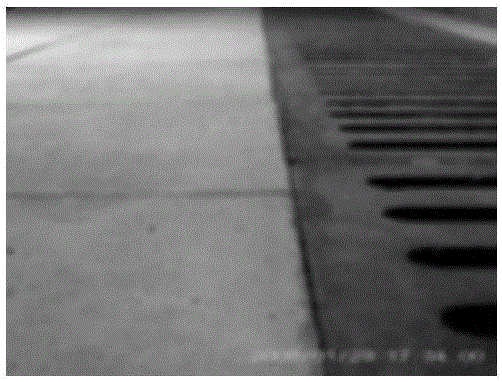
[0093] S1: Acquire road images and use adaptive median filtering to denoise and enhance to obtain enhanced images;
[0094] S2: Select the R component of the enhanced image in the RGB color space, and use the maximum inter-class variance Otsu method to realize the road area segmentation of the image to obtain a binary segmented image, and optimize the binary segmented image with serial mathematical morphology;
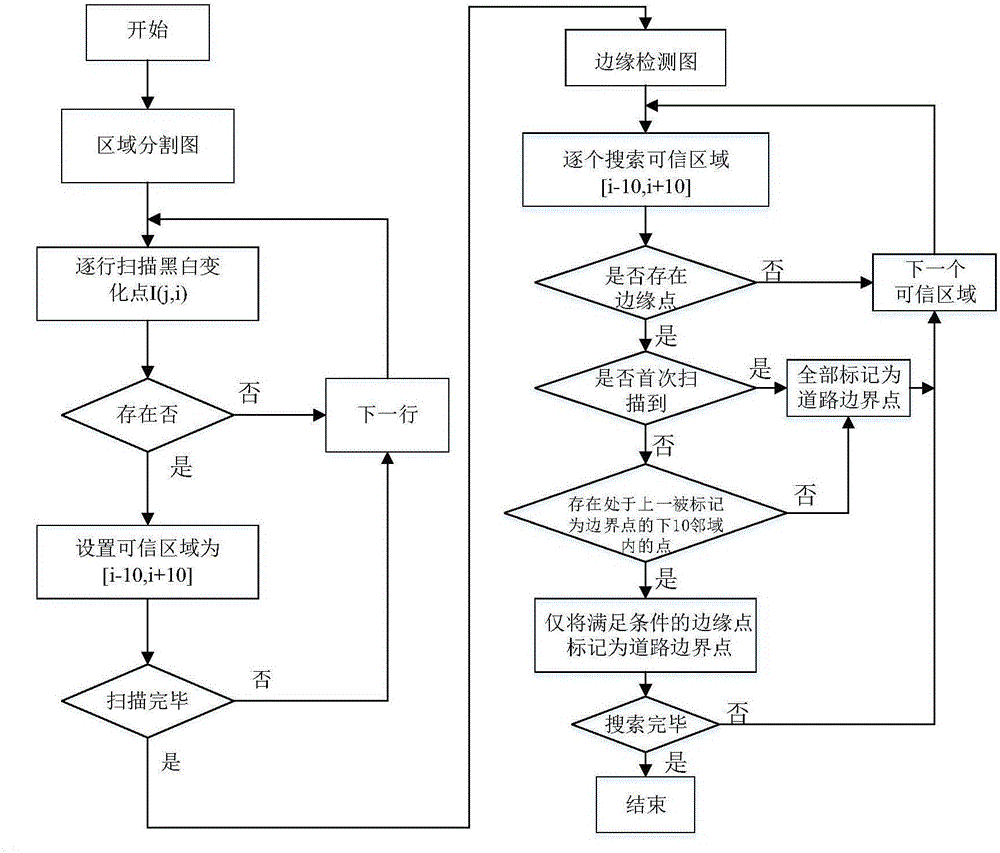
[0095] S3: Use the optimal edge detection Canny operator to detect the binary segmented image to obtain the road edge detection information, and use the maximum between-class variance method to calculate the double threshold in the optimal edge detection Canny operator;
[0096] S4: Obtain the road boundary line in the image by using the binary segmentation image and the road edge detection information.
[0097]...
Embodiment 2
[0146] The image preprocessing provided by this embodiment adopts adaptive median filter, which is usually a nonlinear filter, and its processing effect on random noise is better than that of mean filter, and it can maintain the original clear outline of the image. Filter out image noise. However, there are also some problems in the standard median filter. When the filter template is improperly selected or the template is larger, the details of the image will be erased, and edge refinement will appear. Therefore, in order to obtain better denoising effect and edge details, the specific steps of the adaptive median filter in this embodiment are as follows:
[0147] Let S xy When the center is at the pixel point (x, y), it corresponds to the template window. The minimum value z of pixels within the preset template window min =min(S xy ), the maximum value z of pixels in the template window max =max(S xy ), the median z of the pixels in the template window med =med(S xy )...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More