

Precision robot
A robotic and precise technology, applied in the field of robotics, can solve the problems that the precision of the robot is difficult to meet the precision of the product, and it is difficult to ensure the accuracy of the positioning and trajectory of the robot, so as to achieve the effect of improving the speed and precision of the movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
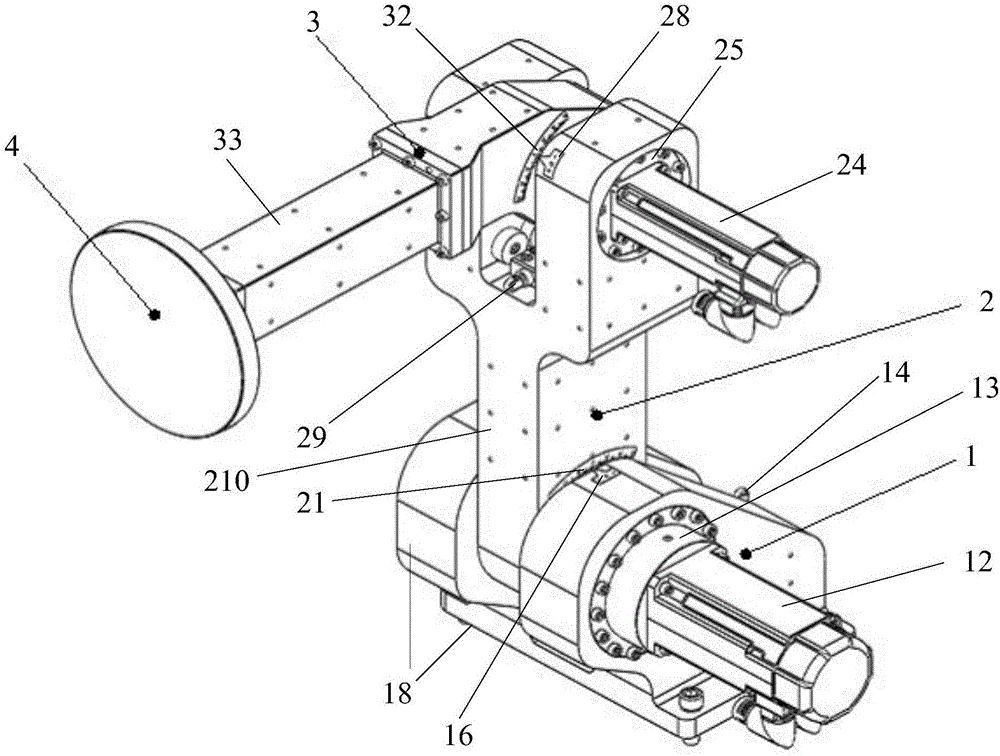
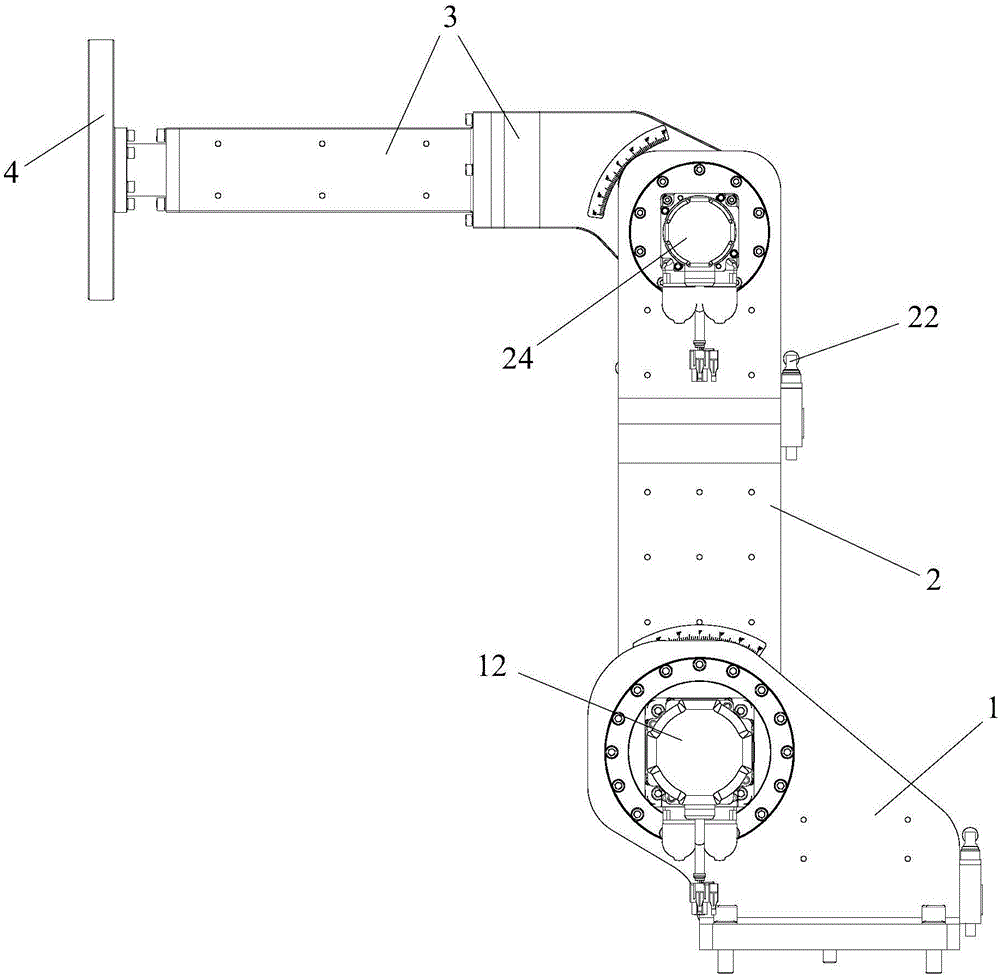
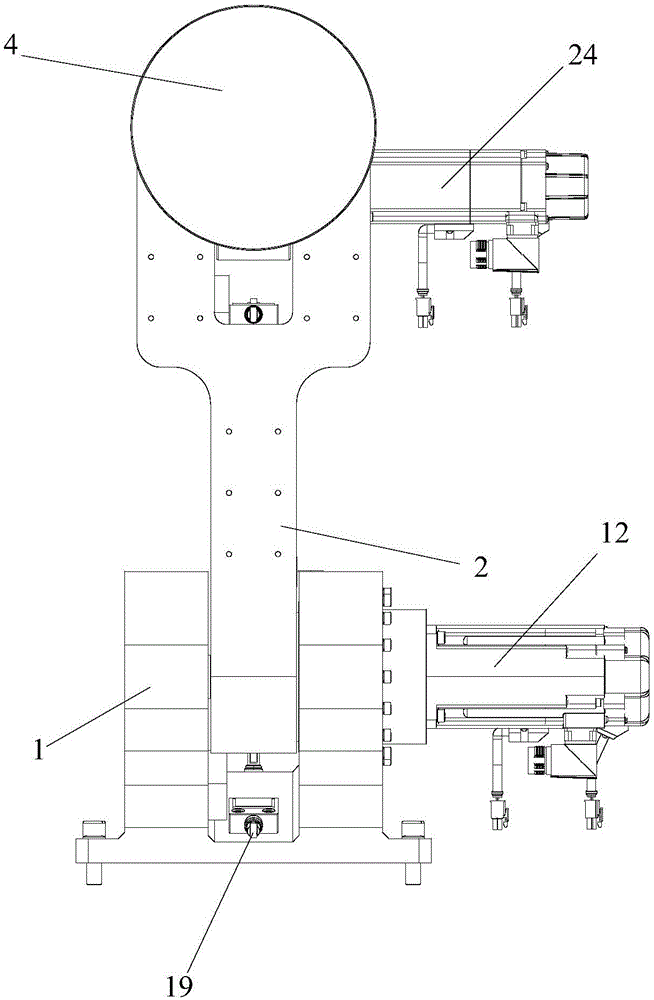
[0027] Such as Figure 1 to Figure 5 As shown, the precision robot of the present invention includes a base assembly 1, a boom assembly 2, a small arm assembly 3 and a control system; wherein, one end of the boom assembly 2 is rotatably arranged on the base assembly 1, and the base assembly 1 There is a first angle encoder 17 that rotates coaxially with the boom assembly 2; one end of the small arm assembly 3 is rotatably arranged on the other end of the boom assembly 2, and the other end of the boom assembly 2 is provided with The second angle encoder 27 that the arm assembly 3 rotates coaxially. The other end of the small arm assembly 3 is used to connect the load, the first angle encoder 17 and the second angle encoder 27 are connected to the input end signal of the control system, the base assembly 1 and the boom assembly 2 are both connected to the output end of the control system signal connection.
[0028] The base assembly of the present invention includes a base 18,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More