

Robot action simulation method and device
A motion simulation and robot technology, applied in the field of robotics, can solve problems such as the difficulty of accurately setting the degree of freedom of the robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] According to an embodiment of the present invention, an embodiment of a method for simulating a robot action is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and , although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
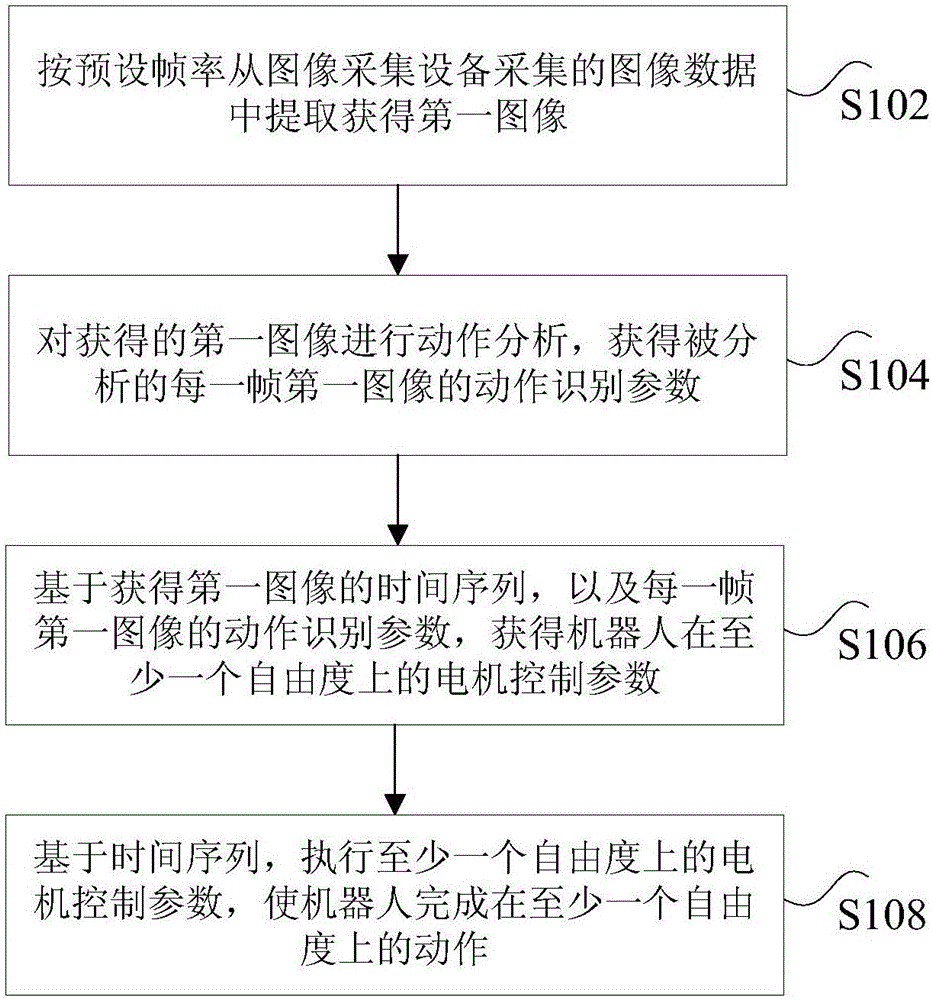
[0030] figure 1 is a flowchart of a method for robot action simulation according to an embodiment of the present invention, such as figure 1 As shown, the robot has an image acquisition device, and the method includes the steps:
[0031] Step S102, extracting a first image from the image data collected by the image collection device at a preset frame rate.
[0032]Specifically, the aforementioned preset frame rate may be 30 Hz, that is, 30 first images are extracted from the image data per second; th...
Embodiment 2
[0075] The present application also provides a device for simulating robot actions, which is used to implement the method for simulating robot actions provided in Embodiment 1, Figure 4 It is a schematic structural diagram of a robot action simulation device according to an embodiment of the present application. The robot has an image acquisition device, and the device includes:
[0076] The extraction module 40 is configured to extract the first image from the image data collected by the image collection device at a preset frame rate.
[0077] Specifically, the aforementioned preset frame rate may be 30 Hz, that is, 30 first images are extracted from the image data per second; the aforementioned image acquisition device may be a video camera, a binocular camera, a depth sensor, a laser radar, etc.; the image acquisition device The collected image may be an image obtained by shooting an action that needs to be simulated by the robot.
[0078] In an optional embodiment, takin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More