

Six-caterpillar-band and four-swinging-arm rescue robot and automatic walking control method
A technology of rescue robot and robot body, applied in the field of robotics, can solve the problems of complex disaster environment, loss of robot signal, and trapped rescue robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
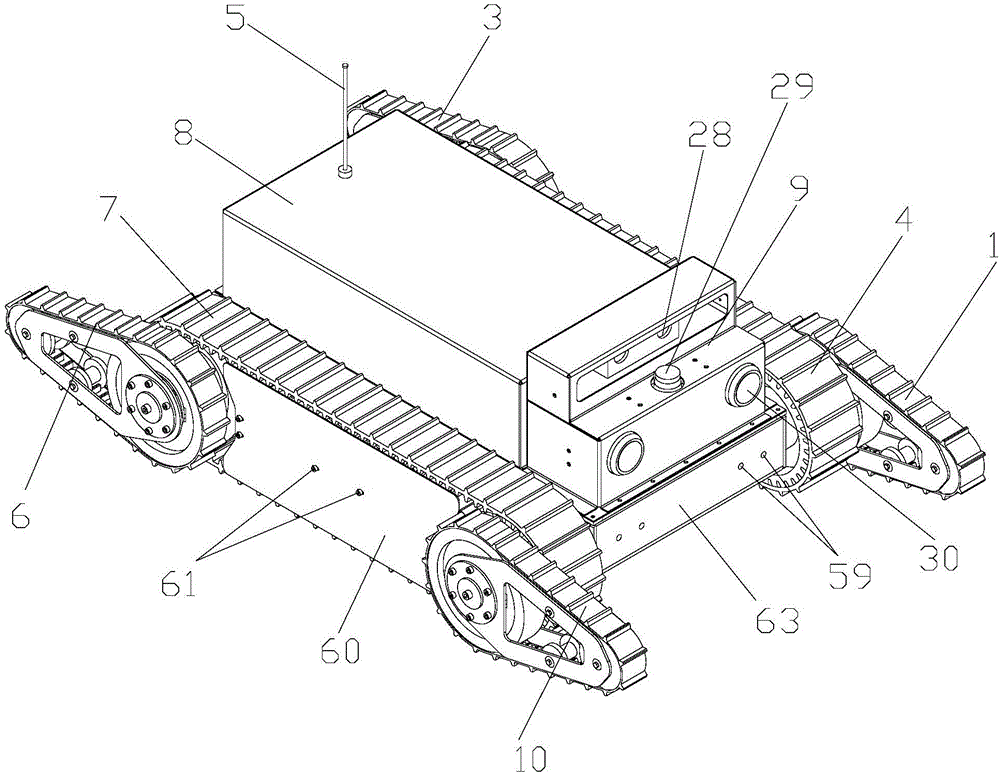
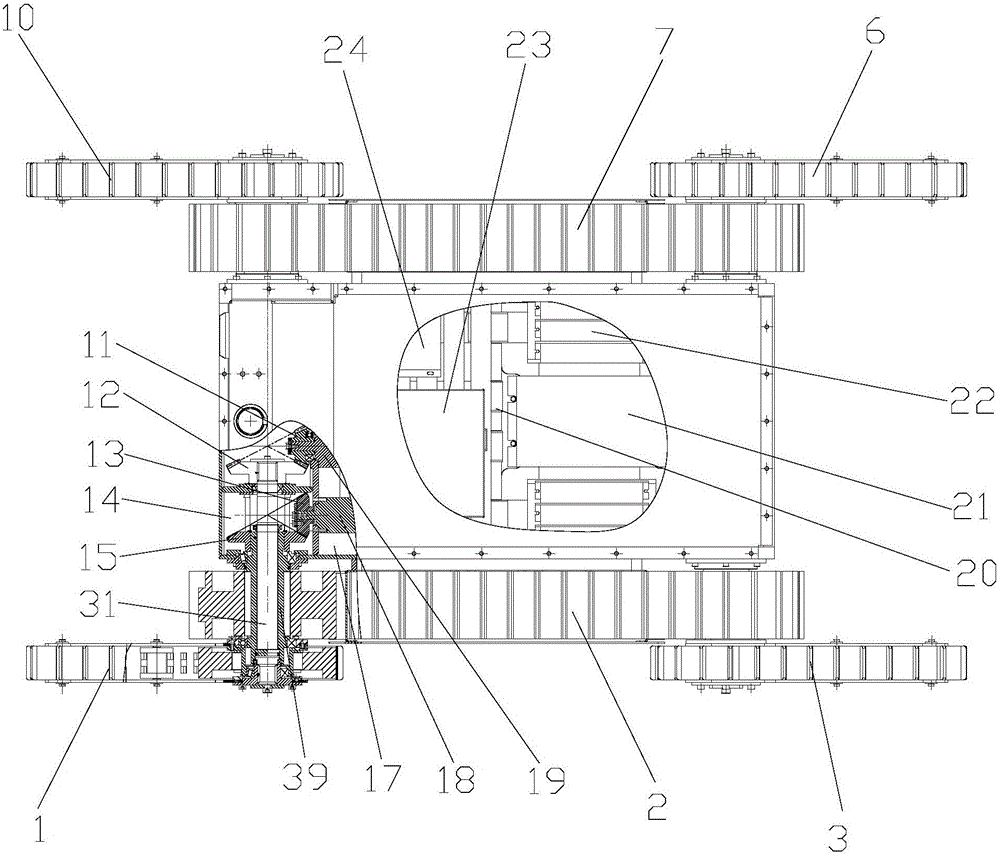
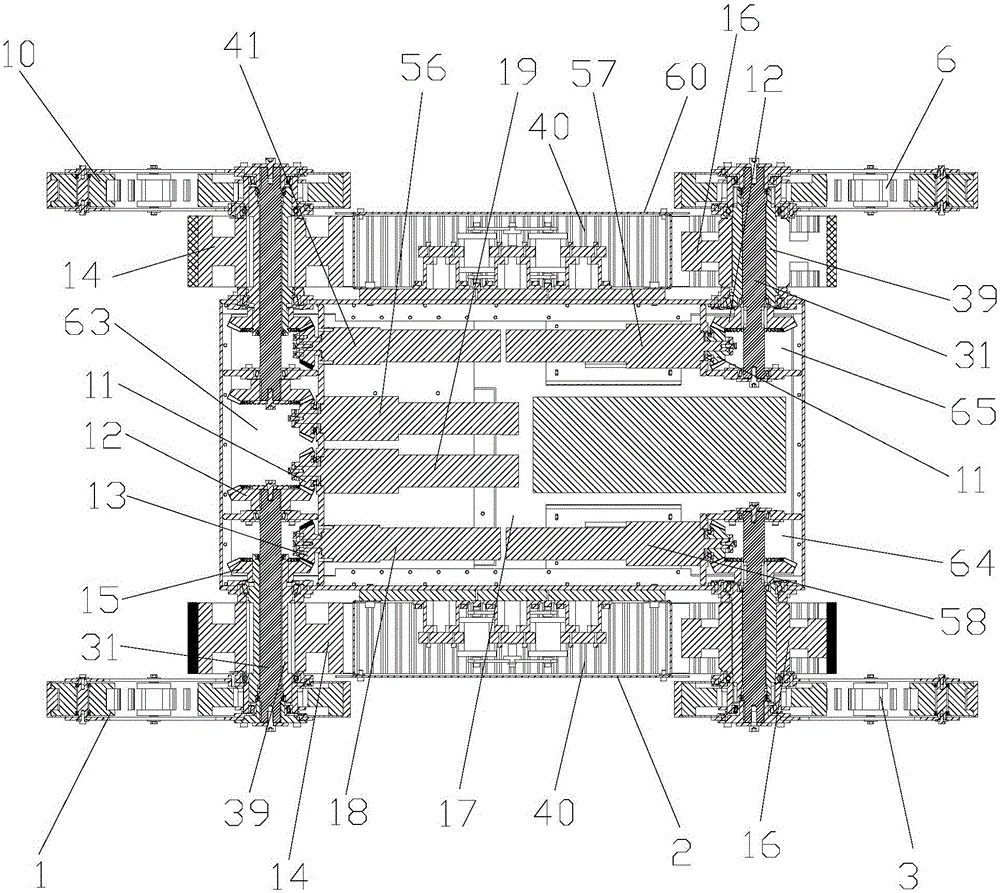
[0082] Such as figure 1 , figure 2 with image 3 As shown, the rescue robot with six crawlers and four swing arms of the present invention includes a robot body, two walking track assemblies and four swing arm crawler assemblies. The robot body includes a lower box cavity 17, an upper box cavity 8, a sensor cavity Body 9, three gear cavities and two supporting wheel cavities, the upper box cavity 8 is arranged on the upper part of the lower box cavity 17, and the sensor cavity 9 is arranged on the upper front side of the upper box cavity 8, The three gear chambers are respectively a front gear chamber 63, a left rear gear chamber 64 and a right rear gear chamber 65. The front gear chamber 63 is arranged on the front side of the lower box chamber 17, and the left rear The gear cavity 64 is arranged on the rear left side of the lower box cavity 17, the right rear gear cavity 65 is arranged on the rear right side of the lower box cavity 17, and the two supporting wheel cavitie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More