

Unmanned vehicle lane dynamic obstacle detection method
A technology for unmanned vehicles and dynamic obstacles, which is applied in the fields of autonomous driving and machine vision, and can solve the problems of low accuracy of detection results and delay in data processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
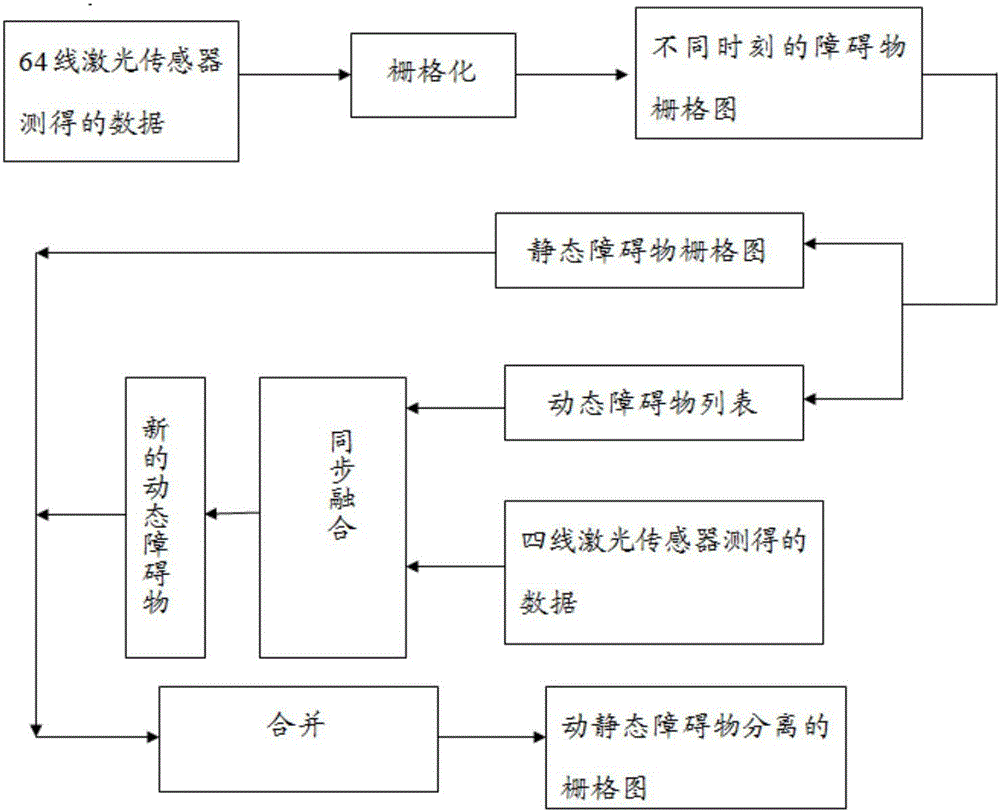
[0046] The embodiment of the present application discloses a method for detecting dynamic obstacles in the lane of an unmanned vehicle, including: 64 laser sensors, 4-line laser sensors, an information processing module, and an actuator. The method includes: matching and verifying the obstacle information obtained by fusing the information detected by the 64 laser sensors and the 4-line laser sensor, and sending a message to the actuator of the driverless car if the error is within the set accuracy range. The control instruction executes the driving control subsystem, which is used to generate a control instruction according to the collected auxiliary information, and controls the unmanned vehicle to perform corresponding operations.
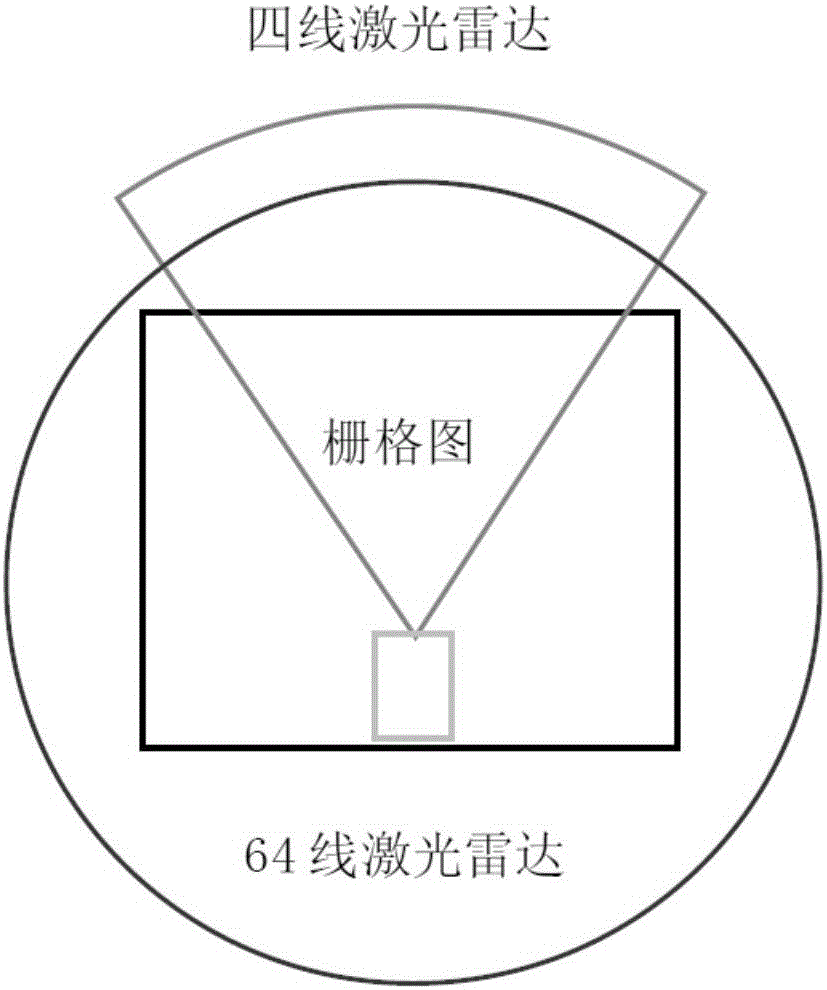
[0047] Further, the obstacle information detected by the 64-line laser sensor and the four-line laser sensor will be fused, including obstacle shape, position, speed and other information, to improve the accuracy of obstacle detection.
[0048] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More