

Wheeled mobile robot point stabilization rolling optimization control method
A mobile robot and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the calculated control quantity does not meet the constraint requirements of the robot system, and the understanding of the wheeled mobile robot point stabilization control method is complicated , implementation difficulties and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
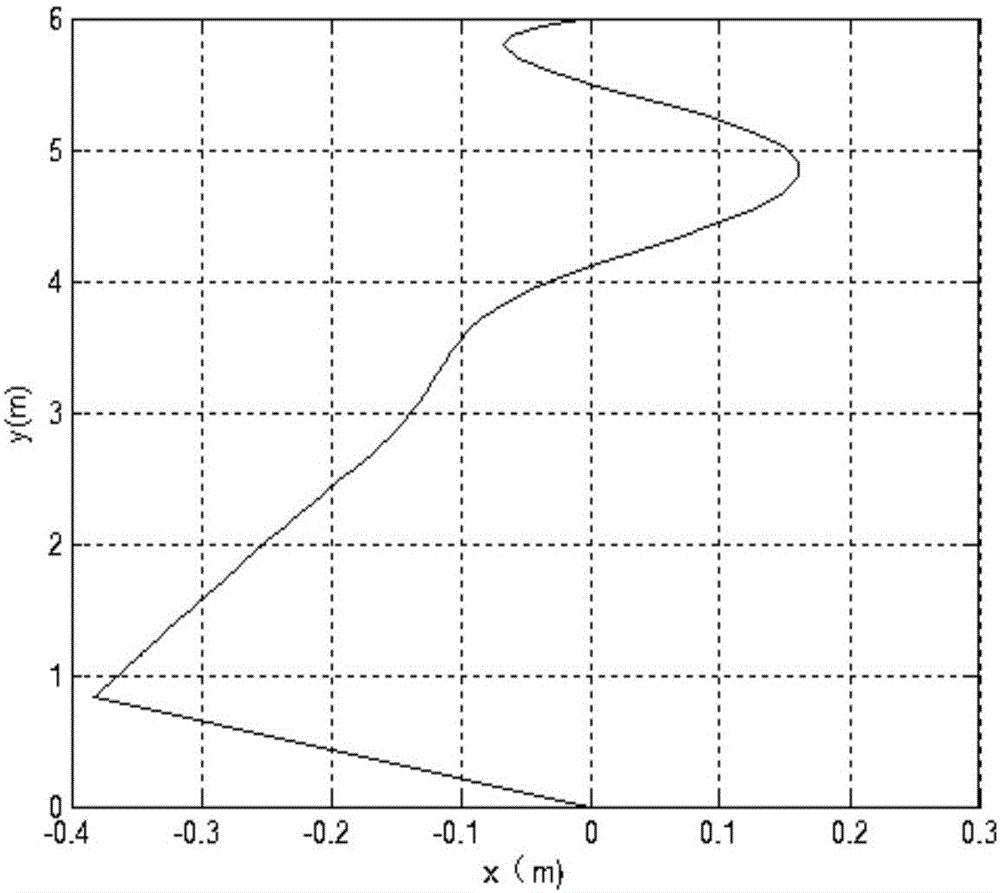
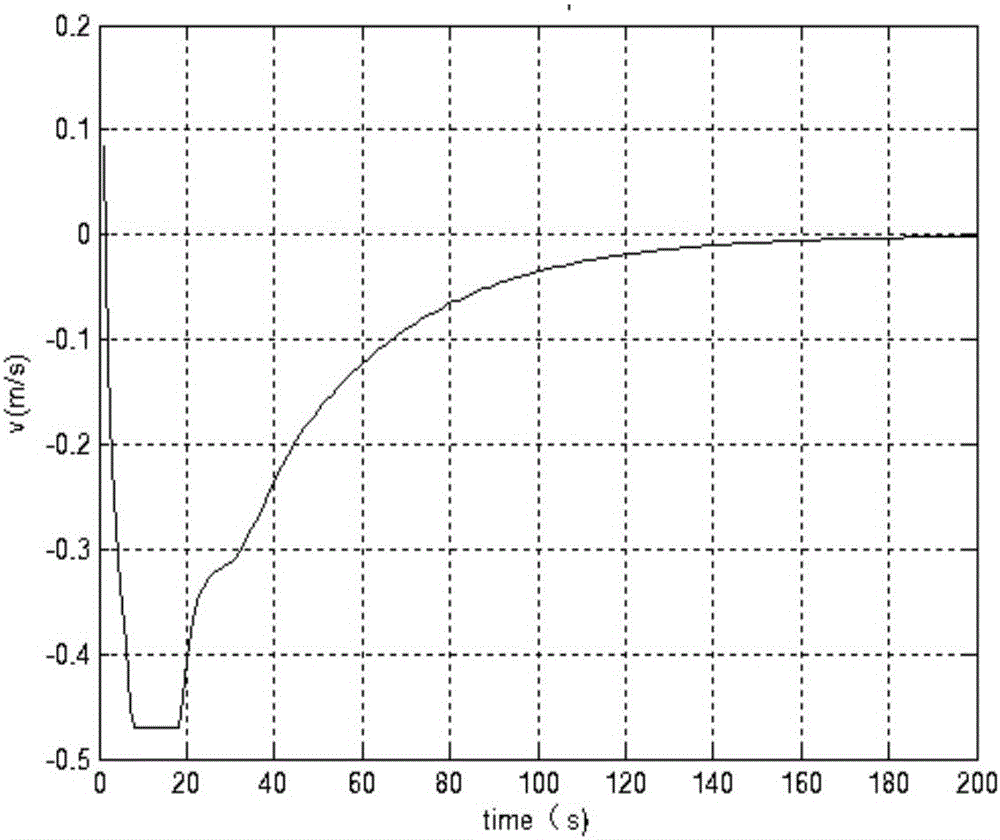
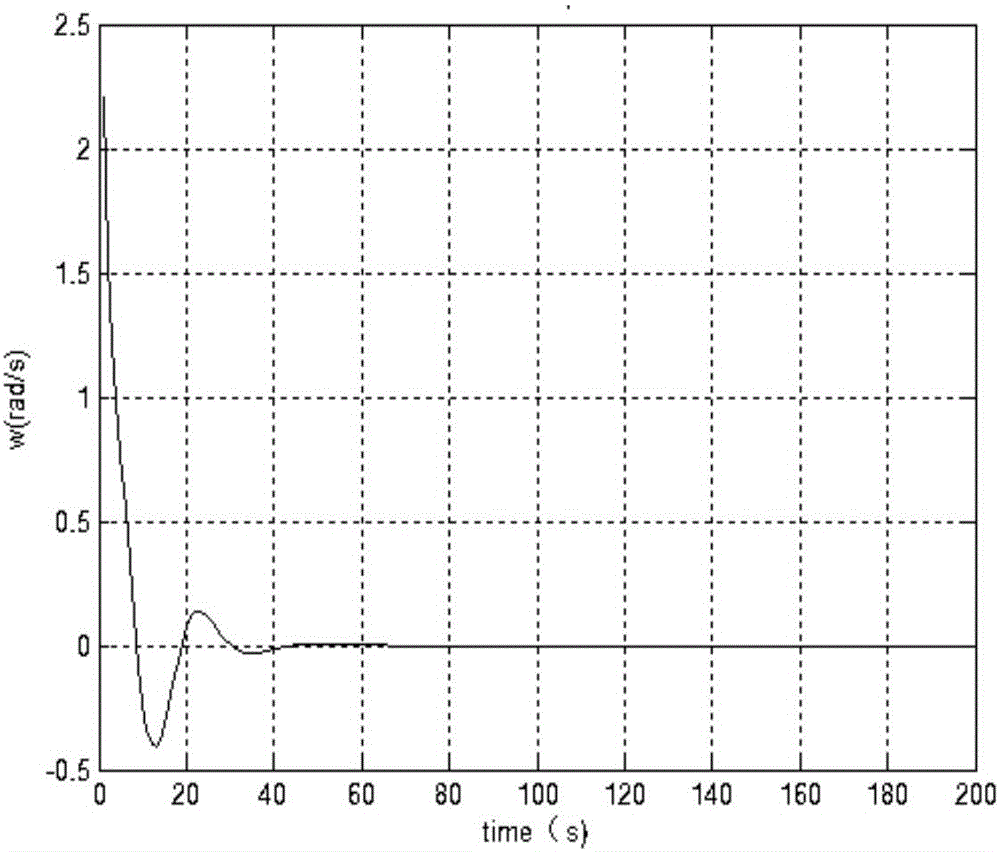
[0042] refer to Figure 1 ~ Figure 3 , a wheeled mobile robot point stabilization rolling optimization control method, the control method comprises the following steps:
[0043] 1) Establish a continuous-time third-order dynamic model of the wheeled mobile robot, see formula (1):
[0044] x · 1 ( t ) = u 1 ( t ) cos x 3 ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More