

UAV supervision method and system
A monitoring system and UAV technology, applied in transmission systems, instruments, electrical components, etc., can solve the problems of inability to supervise UAV flight in real time and effectively, achieve effective air UAV supervision and avoid the effect of blind zone effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
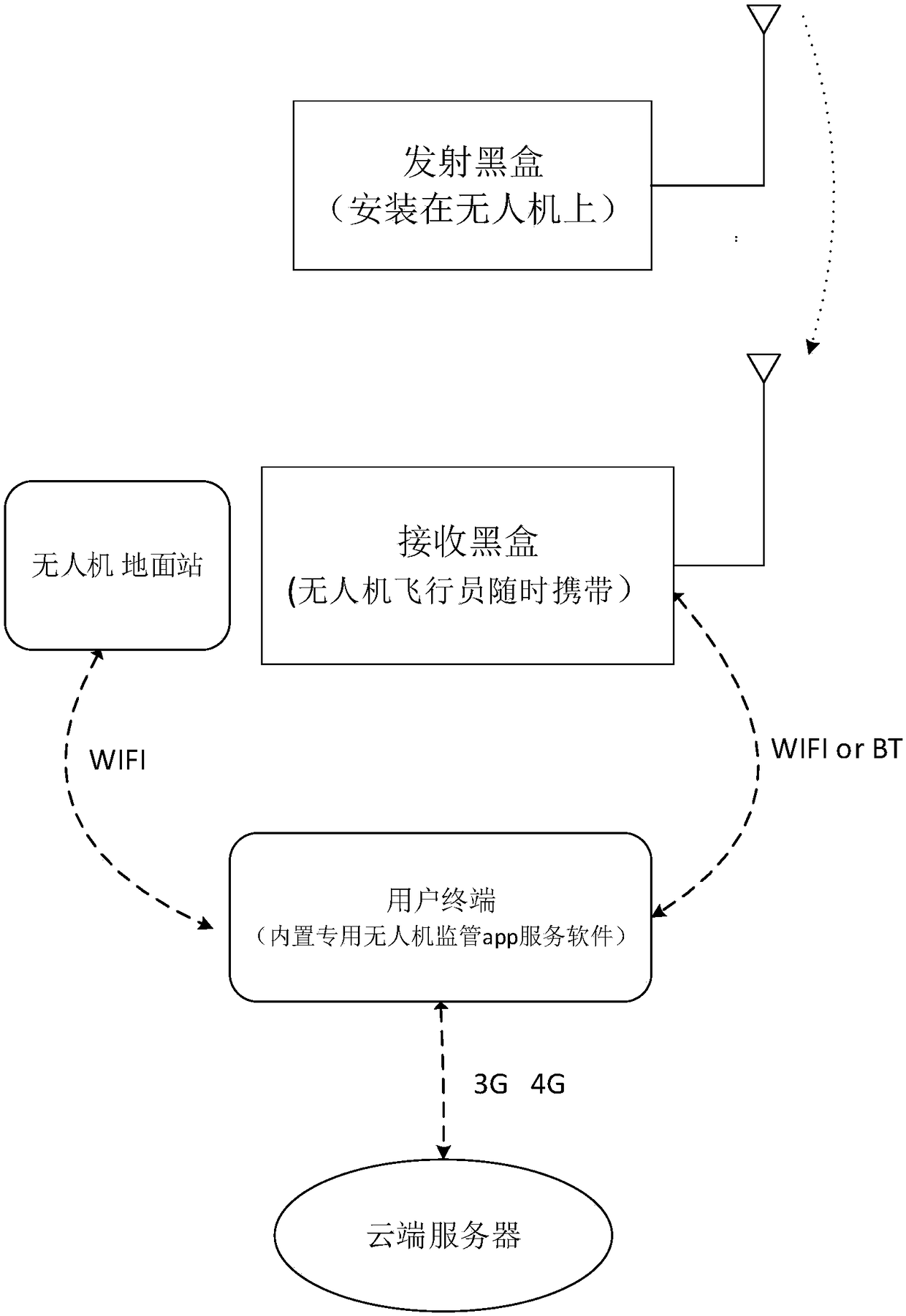
[0050] like figure 1 As shown, the embodiment of the present invention provides a drone supervision method, including:
[0051] Launch the black box to obtain flight data and send it to the receiving black box;
[0052] The receiving black box receives the flight data sent by the launch black box, obtains the pilot's position data, and sends the flight data of the launch black box and the pilot's position data to the user terminal;
[0053] The general ground station obtains flight data and sends it to the user terminal;
[0054] The user terminal receives and receives the flight data of the launch black box and the position data of the pilot sent by the black box, receives the flight data sent by the general ground station, generates flight record information and sends it to the cloud server, and the flight record information includes the flight record information of the launch black box. data, pilot's position data and general ground station flight data;
[0055] The clou...
specific Embodiment 2
[0065] like Figure 4 As shown, the embodiment of the present invention proposes an unmanned aerial vehicle supervision system, including a transmitting black box, a receiving black box, a general ground station, a user terminal and a cloud server, wherein:
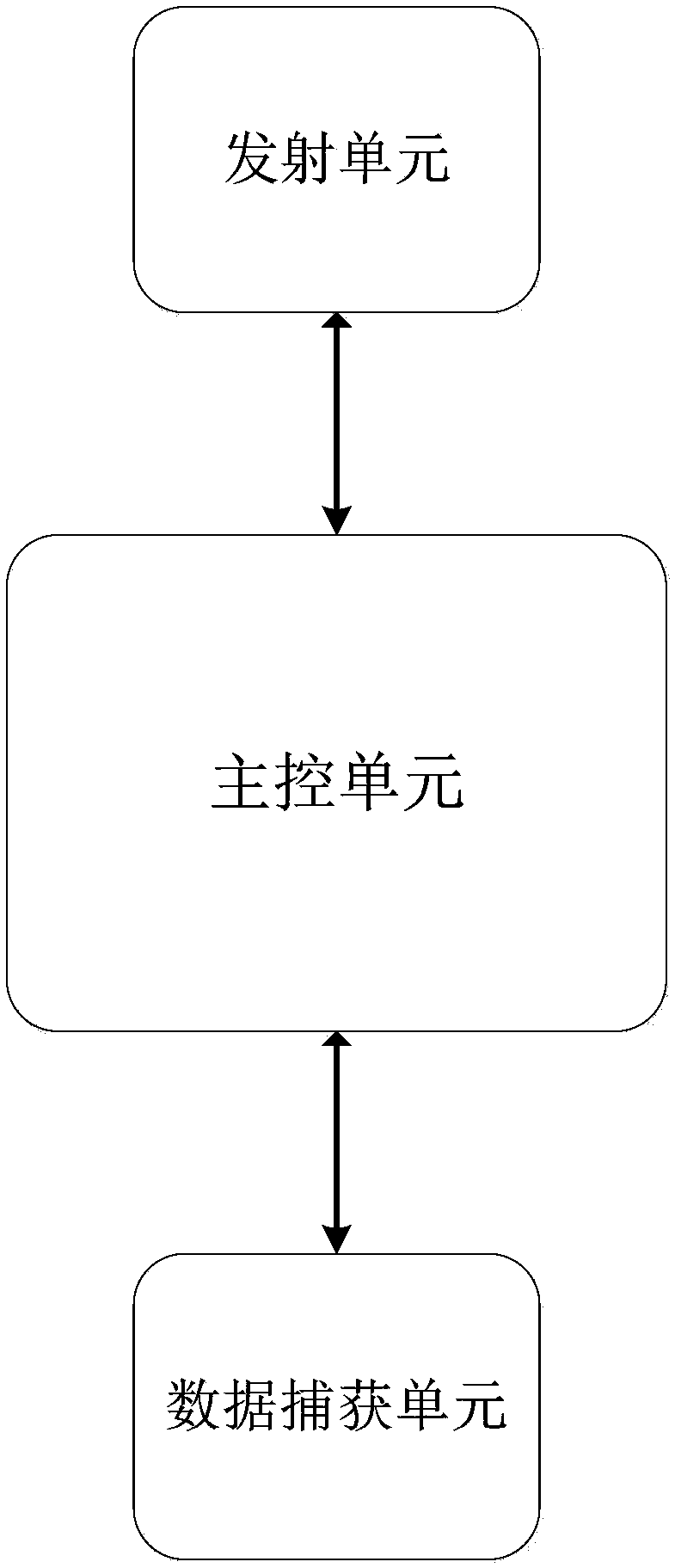
[0066] The launch black box is used to obtain flight data and send it to the receiver black box; the launch black box is located on the UAV 1;
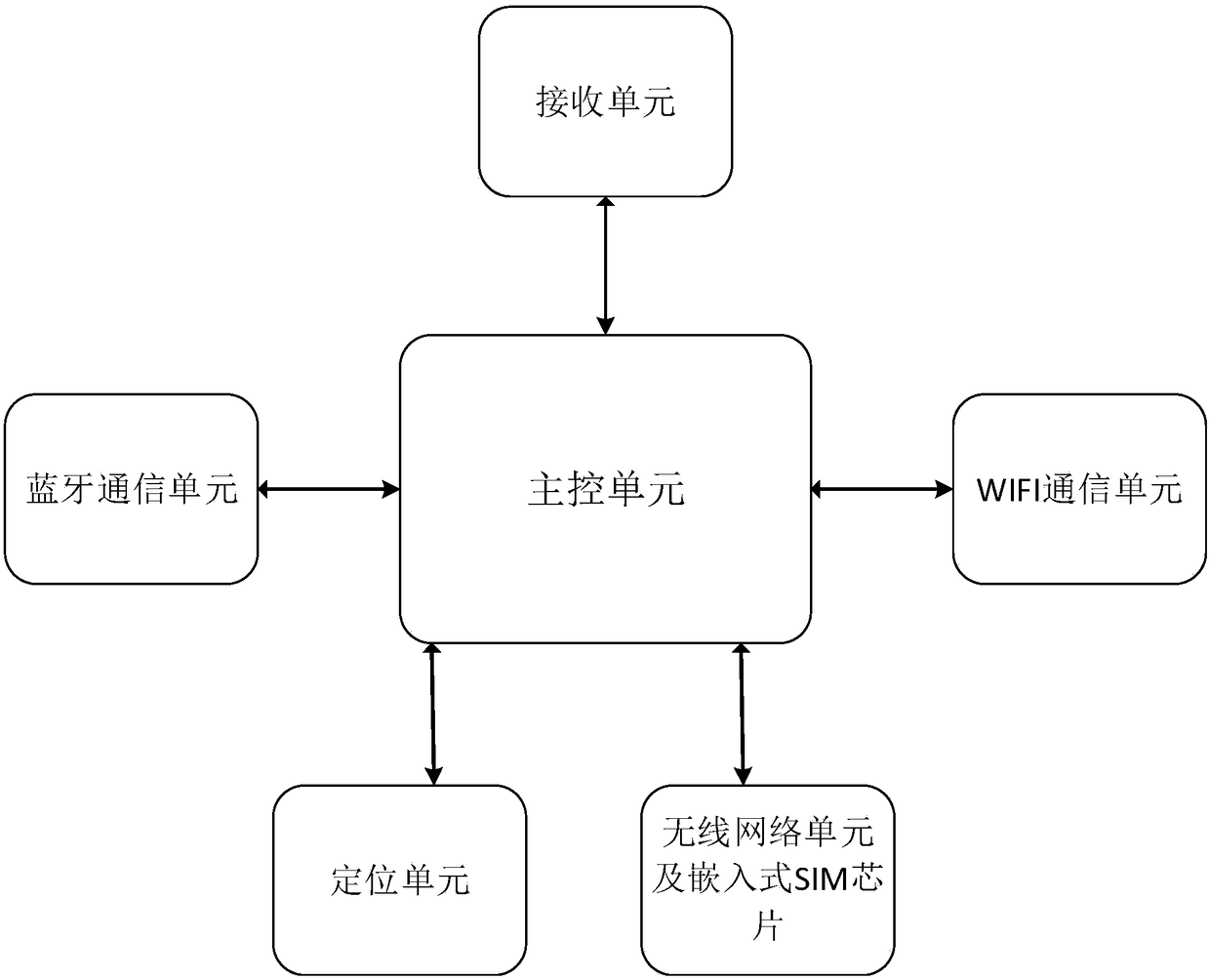
[0067] The receiving black box is used to receive the flight data sent by the launching black box, obtain the pilot's position data, and send the flight data of the launching black box and the pilot's position data to the user terminal 4; the receiving black box is carried by the UAV pilot 2;
[0068] The general ground station 3 is used to obtain flight data and send it to the user terminal 4;
[0069] The user terminal 4 is used to receive the flight data and the pilot's position data of the launch black box sent by the black box, receive the flight data sent by the general gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More