

Auxiliary mechanical arm used for live working and robot
A technology for auxiliary machinery and live work, applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of inability to complete grasping, inability to accurately control positions, simple structure, etc., and achieve light weight, high positioning accuracy, grasping and The effect of large lifting weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings.
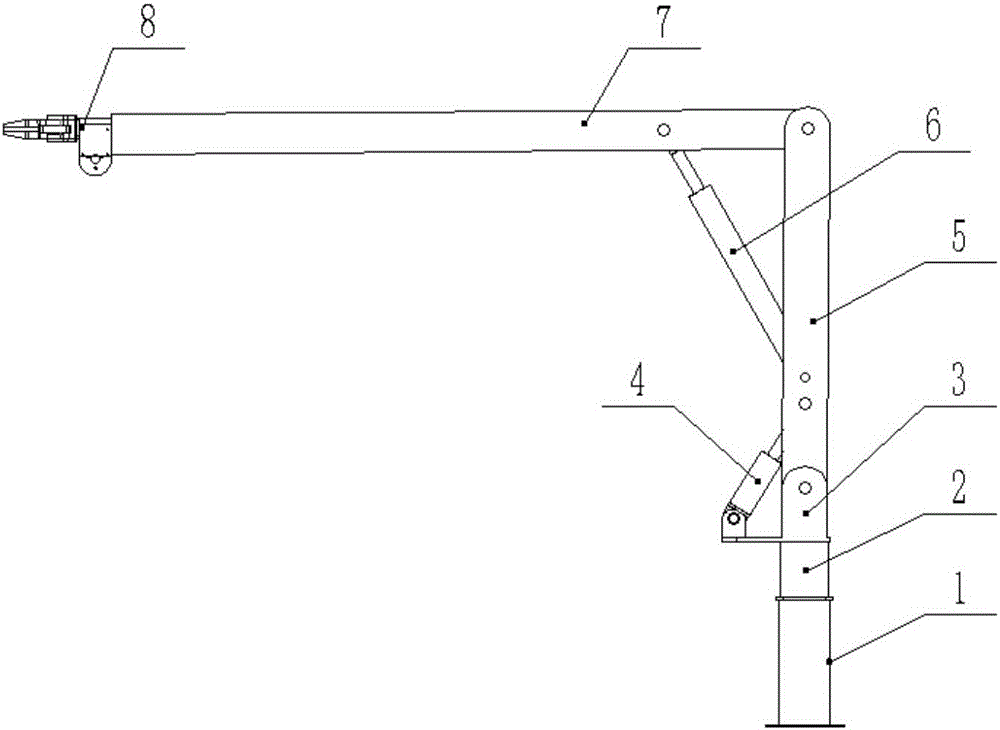
[0032] Such as figure 1 As shown, an auxiliary mechanical arm for live work includes 1 base, 2 swing cylinders, 3 large arm bases, 4 large arm cylinders, 5 large arms, 6 forearm cylinders, 7 forearms, and 8 claws.
[0033] The swing cylinder 2 is connected to the base 1 through screws, the boom base 3 is connected to the swing cylinder 2 through one end of the screw, and the other end is connected to the boom 5, and the boom cylinder 4 is connected to the boom base 3 through one end of the screw , the other end is connected to the upper arm 5, the forearm 7 is connected with the upper arm 5 by screws, the forearm oil cylinder 6 is connected to the upper arm 5 by screws at one end, and the other end is connected to the forearm 7, and the claw 8 is connected by screws, Attached to the forearm 7. The driving conditions of each degree of freedom are as follows. The rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More