

Path planning method for two groups of multi-directional robots based on multi-objective search
A path planning and robot technology, applied in the computer field, can solve the problems of single search target, complex pheromone storage and calculation, low search efficiency, etc., to achieve the effect of improving efficiency, increasing diversity and efficiency, and increasing diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments, but it should not be construed as a limitation on the technical solution.
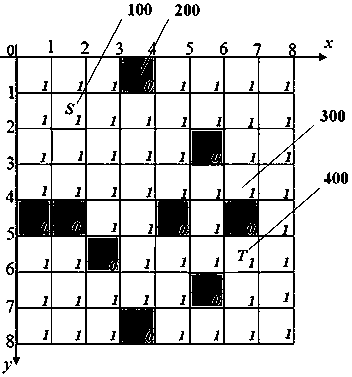
[0033] Figure 1 to Figure 5 It is a schematic diagram of the robot path planning process of the present invention; now in conjunction with Figure 1 to Figure 5 The shown content describes the process of optimizing the walking path of the robot by the ant colony algorithm provided by the present invention. On the whole, it includes the following steps:
[0034] Step 1: If figure 1As shown, a workspace full of obstacles is modeled with a grid to form a grid map. The upper left corner of the grid map is the origin, so that each cell uses a set of coordinates (x, y) in its lower right corner Mark; in the grid map, use 0 to mark the obstacle cell 200, 1 to mark the feasible cell 300, S to be the starting cell 100, and T to be the terminal cell 400;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More