Control method of transmission line bolt fastening robot and controller
A technology for transmission lines and control methods, applied in overhead lines/cable equipment, manufacturing tools, metal processing, etc., can solve problems such as failure to consider bolt swinging, low operating efficiency, and inability to complete automatic bolt centering and tightening.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
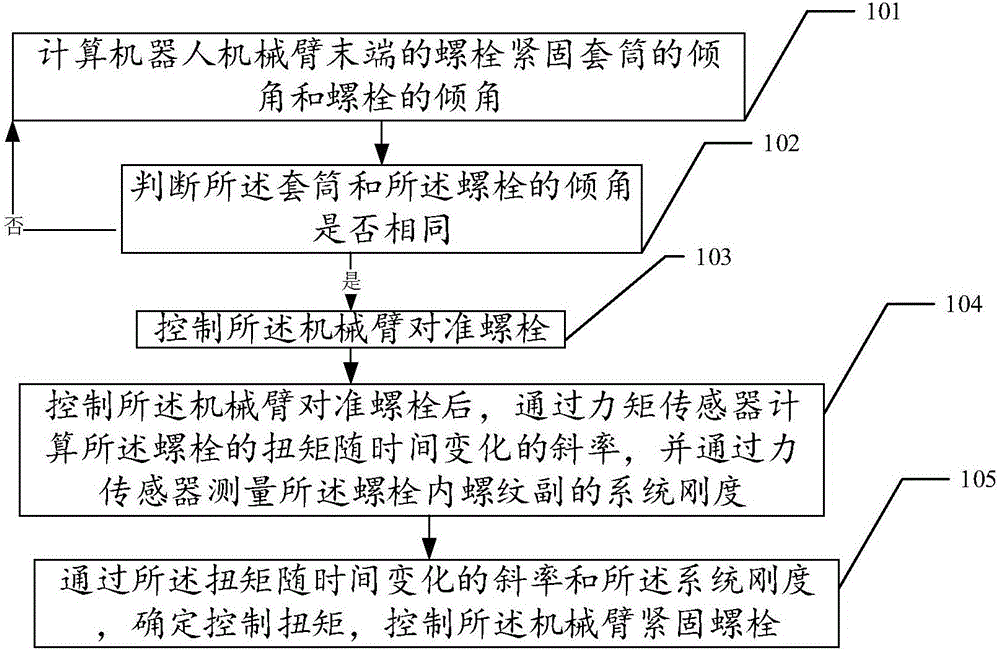
[0057] The embodiment of the present invention provides a control method and a controller for a bolt fastening robot of a power transmission line, which solves the lack of high efficiency, high accuracy and control algorithm of a bolt fastening robot of a power transmission line in the prior art, and most live working robots cannot complete For the automatic centering and fastening of bolts on the transmission line, the live working robot does not take into account the swing of the bolts and the robot under wind conditions, and remotely controls the alignment through video. The operation efficiency is low, which hinders the development of automation in the field of live working. In addition, under the influence of the environment, the internal stress of the bolt changes. Only using experience to tighten the bolt with a constant torque will cause great damage to the life of the bolt, which affects the technical problem of the reliability of the power supply.
[0058] In order to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More