

Biped-walking dining car pushing robot
A technology of robots and dining cars, applied in the field of robots, can solve problems such as the inability to guarantee the basic level of the tray, the food spilled out, and the inability to imitate human walking, so as to save manpower, avoid food spills, and improve the quality of food delivery.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
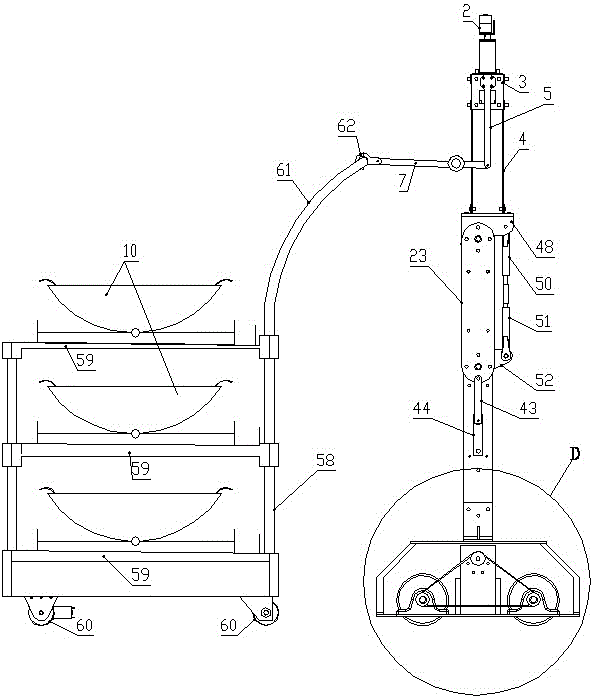
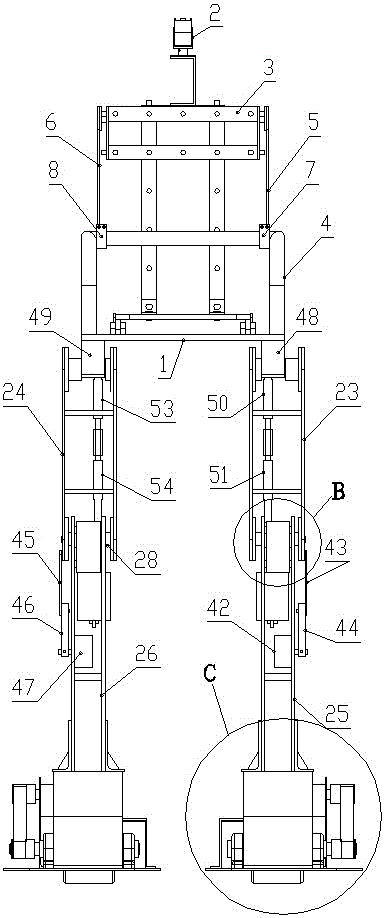
[0042] like Figure 1 to Figure 8 As shown, the biped walking robot of the present invention includes an upper body structure, a waist plate 1, a lower body structure and a dining car;
[0043] The upper body structure is a frame structure, including a main frame whose shape simulates the shape of the upper body of the human body. The main frame includes a head 2, shoulders 3, and chest and abdomen 4. The left side of the shoulder 3 is connected to the left rear arm 5, and the right side of the shoulder 3 The right rear arm 6 is connected, the bottom end of the left rear arm 5 is connected with the left forearm 7, and the bottom end of the right rear arm 6 is connected with the right forearm 8;
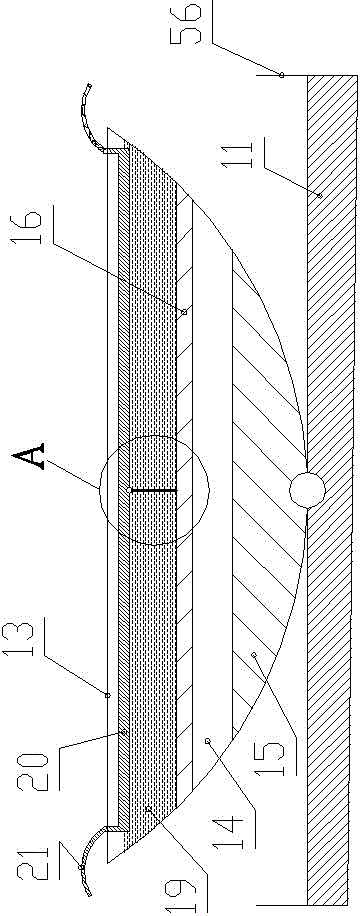
[0044] Dining car comprises frame type vehicle body 58, and on the vehicle body 58, is provided with three layers of carrying frames 59 at even intervals from top to bottom, and the four corners of the bottom of the vehicle body 58 are provided with wheels 60; Both are supported with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More