

Control method of S-shaped curve speed with non-zero initial accelerated speed
A speed control and acceleration technology, applied in the field of S-curve speed control, can solve the problems that the given maximum speed and the given end point speed cannot be adjusted at will, it is difficult to find and correct, and the algorithm is difficult to realize speed regulation and pause in real time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
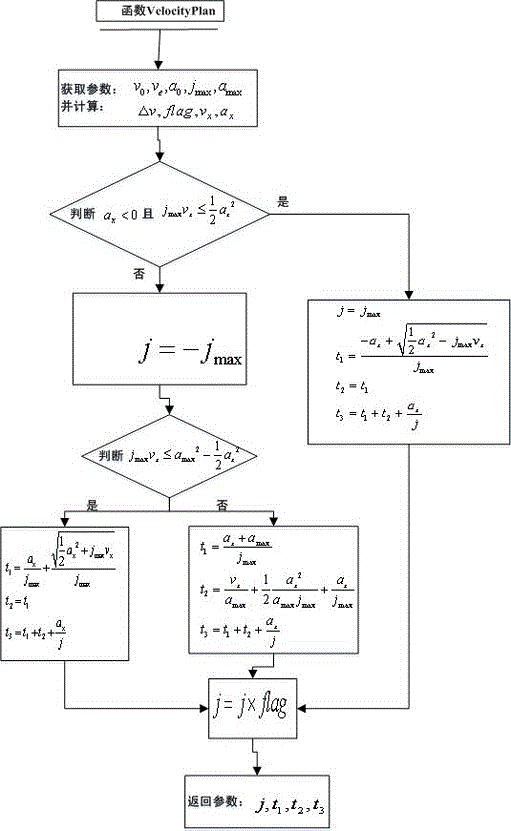
[0054] The present invention adopts following technical scheme:
[0055] The planning is decomposed into three levels for processing, that is, the speed planning layer, the stepping planning layer, and the position planning layer, and three functions are used to realize it respectively. The speed planning layer and the step planning layer are used as the bottom layer to realize the basic S-shaped speed planning and step distance solution. Among them, the speed planning layer performs speed change planning according to the given first and last speeds and first accelerations, and obtains the jerk, uniform acceleration, deceleration cut-off time and jerk direction of the speed change process; the step planning layer calculates one step according to the planning results of the speed planning layer. Or the position, speed and acceleration after running at any time. As the outer layer, the position planning layer calculates the position, speed, and acceleration after one step of op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More