

Portable type flexible-elbow-joint exoskeleton robot
An exoskeleton robot, elbow joint technology, applied in manipulators, gymnastics equipment, program-controlled manipulators, etc., can solve the problems of secondary injury, complex structure, complex drive control, etc., to achieve strong impact load resistance, low output impedance, controllable high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
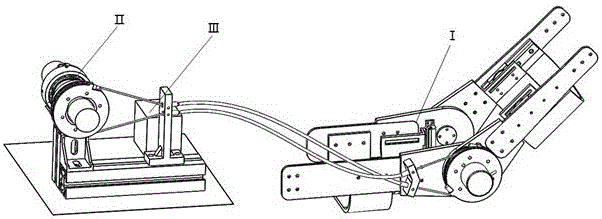
[0032] Such as figure 1 As shown, the robot of the present invention includes: an elbow joint exoskeleton mechanism I, a driving mechanism II and a control device III.
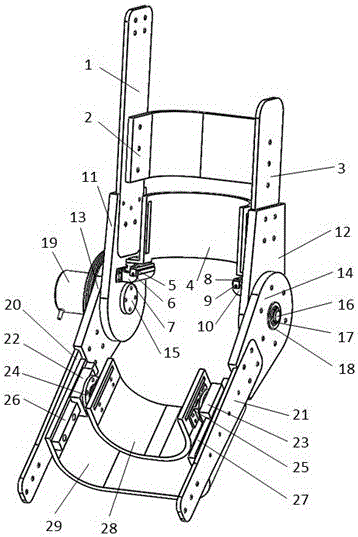
[0033] Such as figure 2 As shown, the elbow joint exoskeleton mechanism I of the present invention includes: an upper arm support mechanism, a main transmission mechanism and a forearm support mechanism.
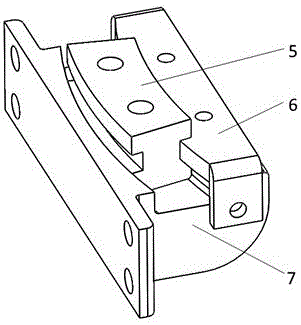
[0034] The upper arm support mechanism includes upper arm left support plate 1, upper arm outer cover 2, upper arm right support plate 3, upper arm inner sleeve 4, arc slider one 5, arc slider two 8, left arc groove guide rail 7, right arc gro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More