

Trajectory tracking control method for input-output asymmetrically limited full-drive surface ship
An input-output, trajectory tracking technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as output limitation, performance degradation, asymmetrical input saturation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0101] The present invention "input-output asymmetrically limited full-drive surface ship trajectory tracking control method", its specific steps are as follows: Step 1: given expected tracking value
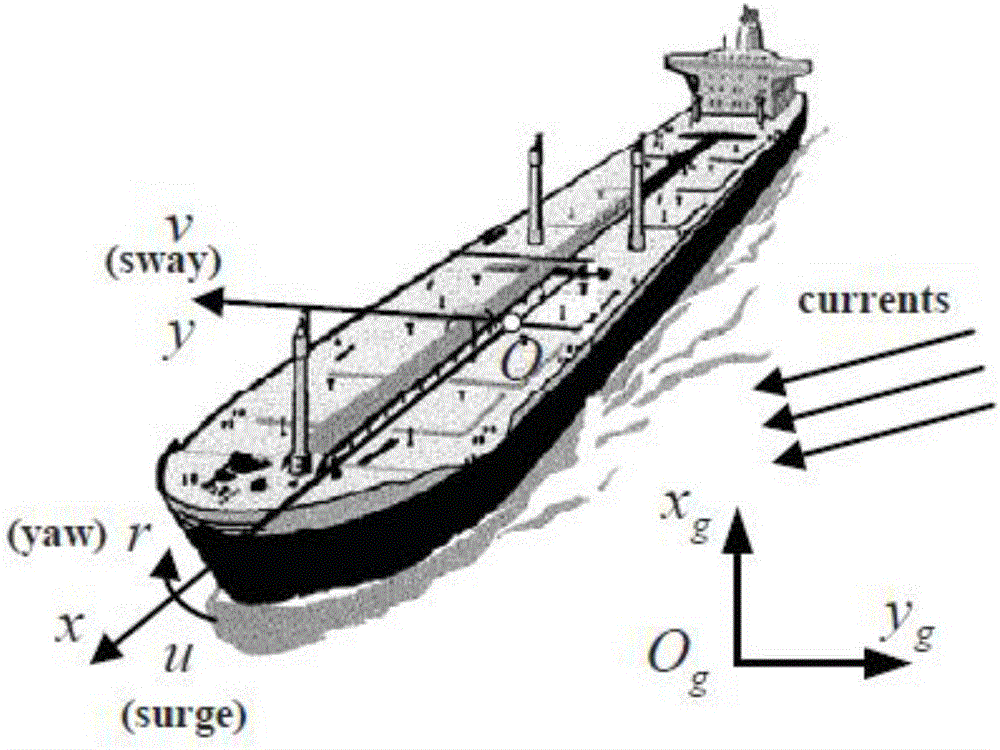
[0102] 1) if figure 1 As shown, take a fixed point as the origin, the x-axis points to the north, and the y-axis points to the east to establish an inertial coordinate system; take the structural geometric center in the surface ship model as the origin, the x-axis points to the head of the ship, and the y-axis is vertical On the x-axis, a body coordinate system is established.
[0103] 2) The given expected trajectory is η d =[x d ,y d ,ψ d ] T , the meaning of the three components is: (x d ,y d ) represents the desired plane position, ψ d Indicates the yaw angle.
[0104] Step 2: Calculate the trajectory tracking error z 1
[0105] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More