Upper limb rehabilitation exoskeleton robot based on serial elastic drivers and method
An exoskeleton robot and serial elastic technology, applied in the direction of passive exercise equipment, manipulators, sports accessories, etc., can solve the problems of limiting the range and effect of rehabilitation training, reducing the comfort of the training process, and fewer training modes, so as to improve training safety Sex and comfort, increase cost and floor space, increase the effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solution of the present invention will be described in detail below in combination with the embodiments and the accompanying drawings.
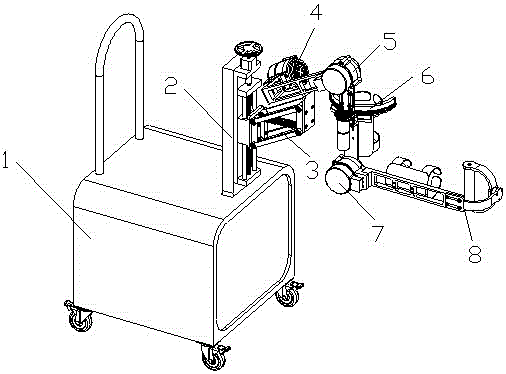
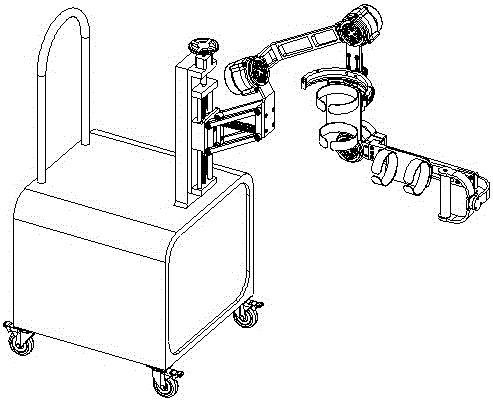
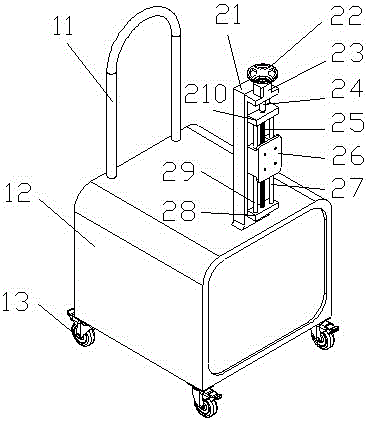
[0033] like Figure 1 to Figure 7 As shown, a rehabilitative exoskeleton robot based on the left and right upper limbs based on serial elastic actuators, the mechanism includes a mobile frame 1, a height adjustment module 2, a shoulder lifting / lowering joint 3, and a shoulder swinging / abducting Joint 4, shoulder flexion / extension joint 5, shoulder internal / external rotation joint 6, elbow flexion / extension joint 7, and hand module 8.
[0034] The mobile frame 1 includes a control cabinet 12; the height adjustment module 2 includes a hand wheel 22, a vertical base 23, a coupling 24, a screw 25, a mobile platform 26, a first optical axis 27, an upper bearing seat 28, and a second optical axis 29 and the lower bearing seat 210, the vertical base 23 is fixed to the control cabinet 12, the upper bearing seat 28 and the lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More