

Speed self-adaptive control method of lower limb rehabilitation training system treadmill based on myoelectricity
A technology of adaptive control and rehabilitation training, which is applied in the direction of adjusting coordination training equipment, cardiovascular system training equipment, gymnastic equipment, etc. Obvious problems such as speed regulation, to avoid the inconvenience of installation and use, save costs, and overcome constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
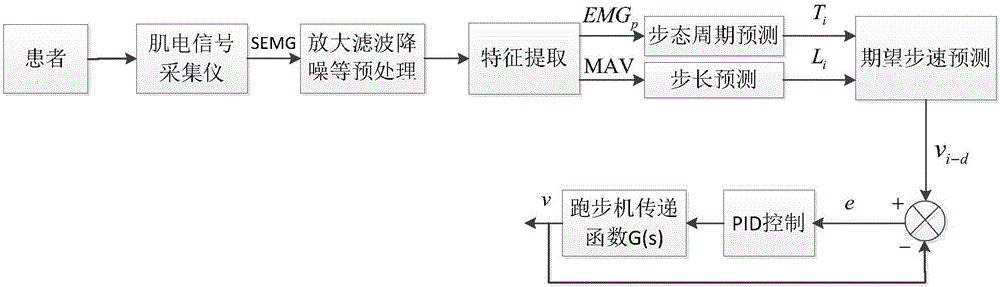
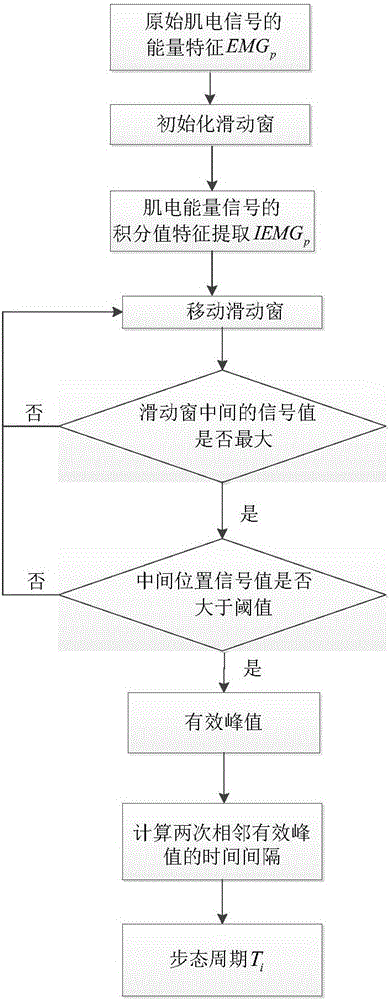
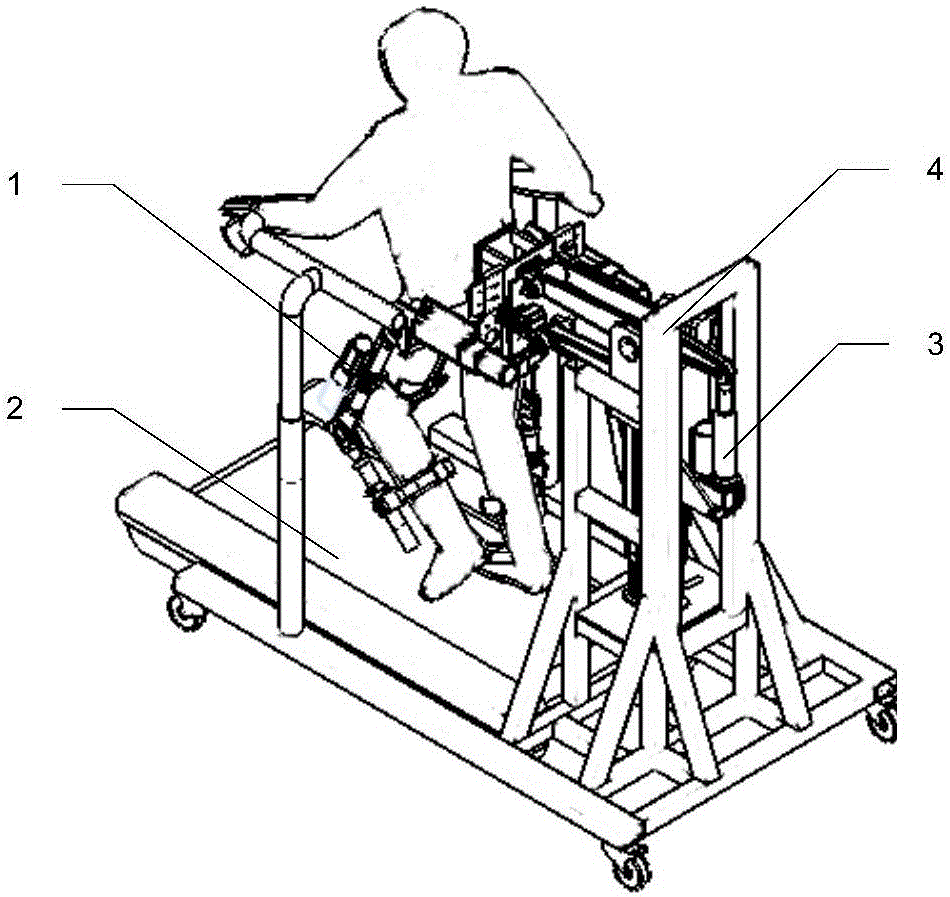
[0044] see figure 1 and Figure 4, The self-adaptive control method of the treadmill speed of the lower limb rehabilitation training system based on myoelectricity of the present invention: the surface myoelectric signal related to the gait movement of the patient's lower limbs is collected in real time through the myoelectric signal acquisition instrument, and preprocessed by amplification, filtering, noise reduction, etc. Finally, the time-domain analysis method is used to extract the amplitude and energy features of the relevant EMG signals, and the gait cycle and step length of the lower limb movement of the patient are predicted in real time through the gait cycle detection algorithm and the step length estimation algorithm; The expected speed of the active movement of the lower limbs of the patient is used to generate the expected speed command signal for controlling the treadmill; at the same time, the speed transfer function model of the treadmill in the lower limb reh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More