

Control method and control system for worming torque of electric automobile and electric automobile
An electric vehicle, torque control technology, applied in the direction of control devices, vehicle components, transportation and packaging, etc., can solve the problems of high acceleration, no creep, creep control methods no longer applicable on flat roads, etc., to achieve comfortable good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to further explain the technical means and effects of the present invention to achieve the intended purpose of the invention, the specific implementation, structure, features and effects of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
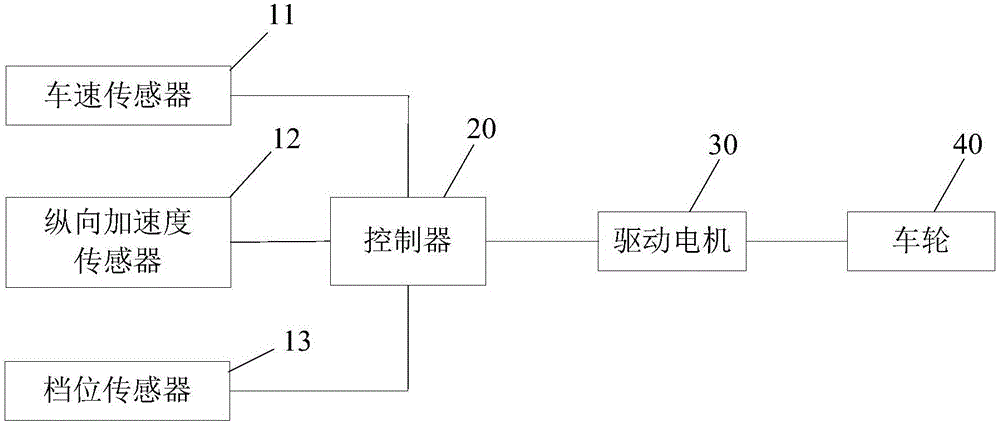
[0032] figure 1 It is a schematic structural diagram of an electric vehicle creep torque control system in an embodiment of the present invention, please refer to figure 1 The electric vehicle creep torque control system provided in this embodiment includes a vehicle speed sensor 11 , a longitudinal acceleration sensor 12 , a gear position sensor 13 , a controller 20 and a drive motor 30 .
[0033] The controller 20 is electrically connected to the vehicle speed sensor 11 , the longitudinal acceleration sensor 12 , the gear position sensor 13 and the driving motor 30 respectively.
[0034] The driving motor 30 is connected with the wheel 40 to p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More