

Control method for electric vehicle creep torque
A technology for electric vehicles and control methods, which is applied in electric vehicles, transmission control, control driving, etc., can solve problems such as difficult implementation, difficult and troublesome calibration, and achieve the effects of easy implementation, simple and intuitive principle, and simple calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
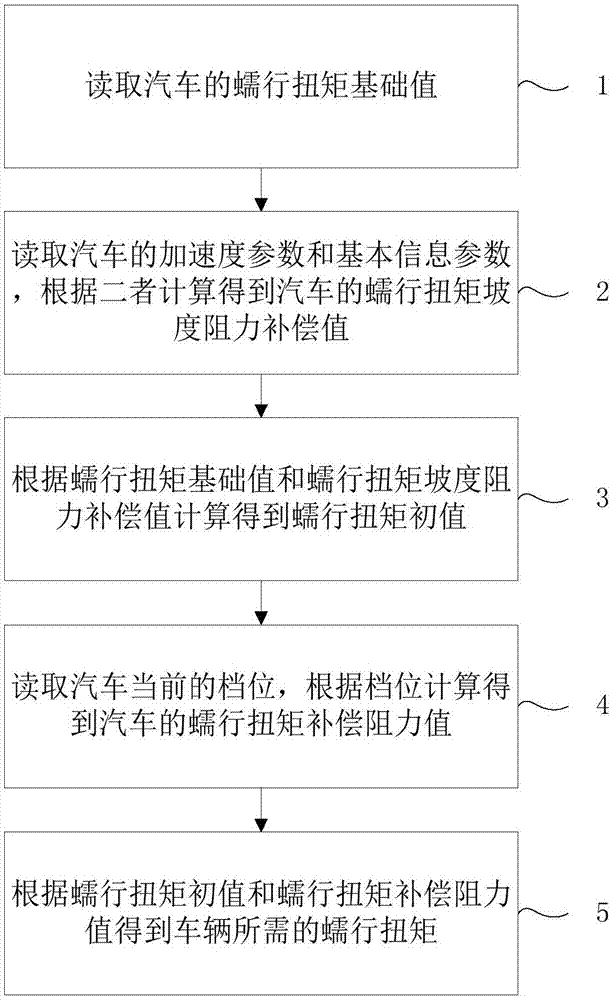
[0036] Such as figure 1 As shown, the present embodiment provides a method for controlling the creep torque of an electric vehicle. The vehicle controller controls the motor by calculating the creep torque required by the electric vehicle, including the following steps:
[0037] 1) Read the base value T of the creep torque of the car q _creep_base;
[0038] 2) Read the acceleration parameters and basic information parameters of the car, and calculate the creep torque slope resistance compensation value T of the car according to the two q _slope:
[0039] 21) Read the acceleration ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More