

Positioning device and positioning navigation algorithm of robot based on infrared visual technology
A vision technology and a positioning device technology, which is applied in the field of positioning devices and positioning and navigation algorithms, can solve the problems of slow recognition speed, low recognition rate, and greater influence of image afterimages
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
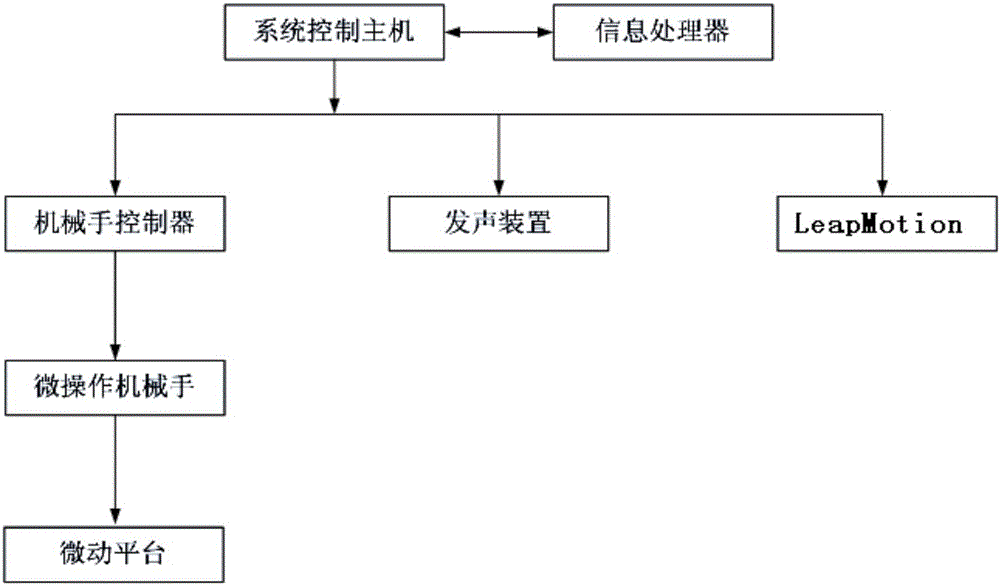
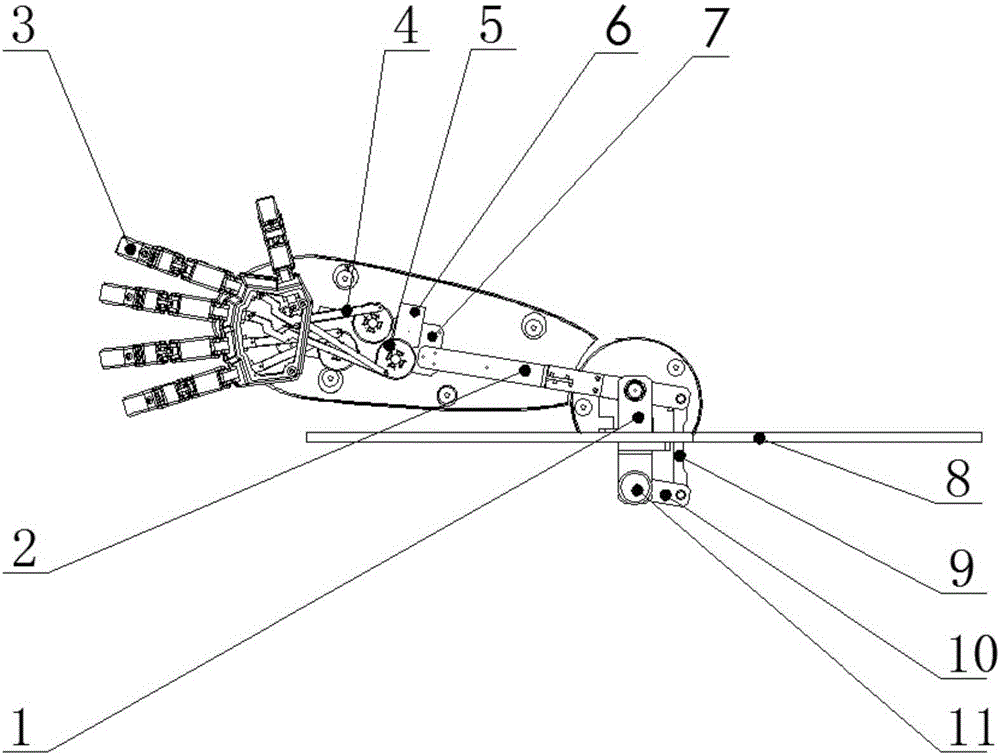
[0032] A positioning device for a robot based on infrared vision technology, comprising: infrared image acquisition equipment, a positioning control module that receives information from the infrared image acquisition equipment; the infrared image acquisition equipment consists of: an infrared signal lamp, an infrared camera, located on the infrared camera The positioning star mark 1 of infrared reflection; the infrared camera is composed of: an infrared lens 2, an infrared light-emitting tube 3 arranged around the infrared lens 2, and an infrared camera circuit board 4 arranged under the infrared light-emitting tube 3 . It should be noted that the positioning control module is realized based on the following hardware conditions, operating system: Microsoft Windows 7 Professional SP1, processor: Intel(R) Celeron(R) CPU N3150 @ 1.60GHz, mem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More