An Adaptive Cooperative Navigation Filtering Method
A collaborative navigation and self-adaptive technology, applied in the direction of navigation computing tools, etc., can solve the problems of limiting the scope of application of AUV, not taking into account, etc., and achieve the effect of increasing the number of models, good modularity, and good post-correction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0043] The specific operation is as follows:
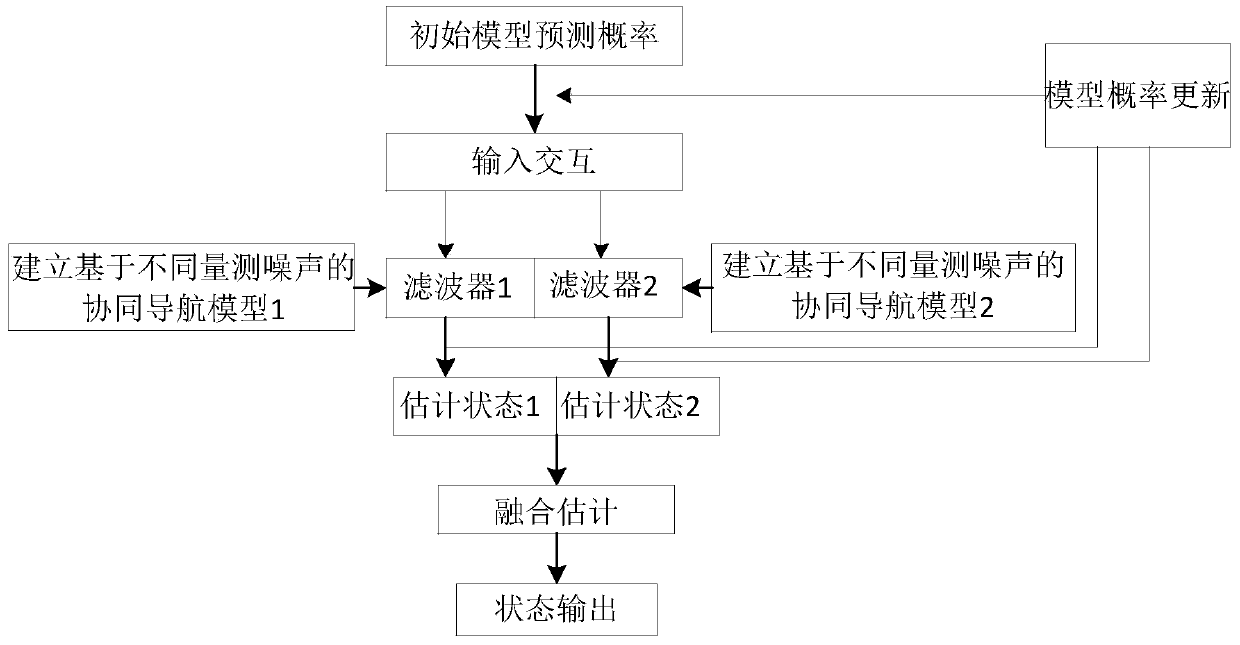
[0044] Combine below figure 1 And embodiment, content of the present invention is described in further detail.
[0045] Step 1: Enter the interactive process
[0046] Such as figure 1 As shown, the interactive multi-model algorithm is a cyclic algorithm, and the state estimation is completed through four processes of input interaction process, model filtering, model probability update and output interaction process.
[0047] In the input interaction process, the mixed state is obtained through the predicted model probability for the first time, and the calculated model probability is replaced by the calculated model probability in the next cycle.
[0048] Cooperative navigation is estimated from the AUV interactive hybrid state and the covariance is:
[0049]
[0050]
[0051] In the formula is the state estimation of the jth filter at time k-1; P j (k-1) is Corresponding covariance matrix; P 0i (k-1) is the state ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More