

A method, system and robot for generating interactive content of robot
A technology of interactive content and generation system, applied in the field of robot interaction and robot interaction content generation, it can solve the problems of poor robot intelligence and robots cannot be more anthropomorphic, so as to improve intelligence, improve human-computer interaction experience, and improve anthropomorphism. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
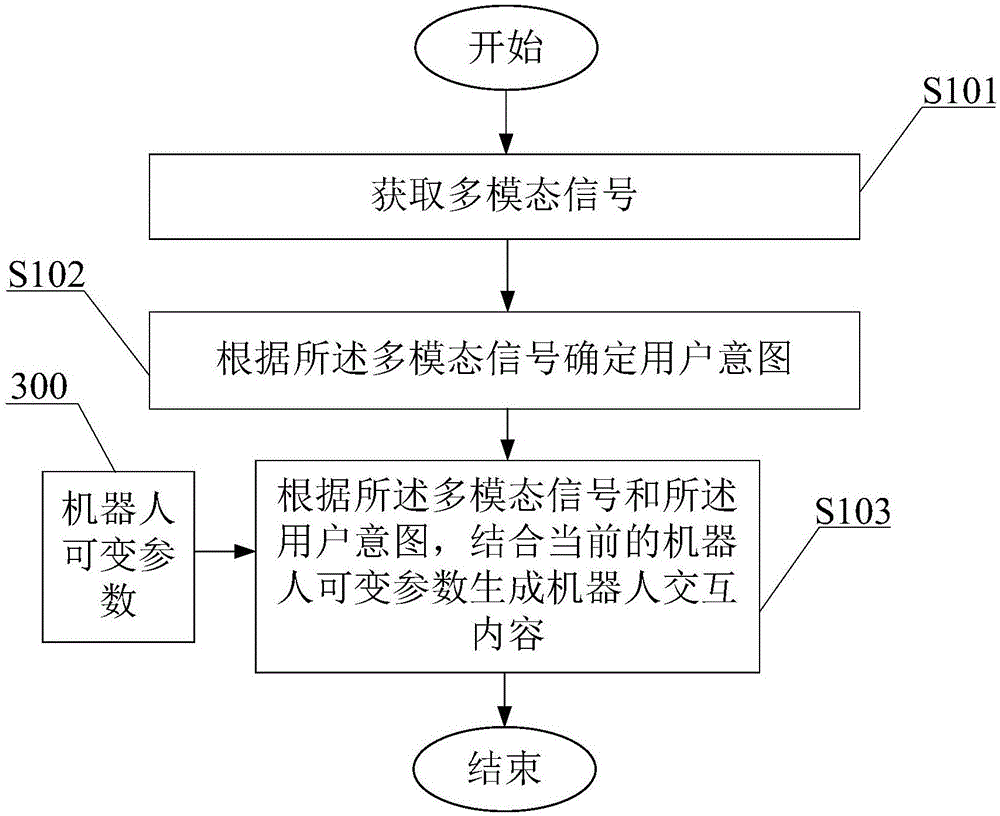
[0043] Such as figure 1 As shown, this embodiment discloses a method for generating robot interaction content, including:
[0044] S101. Obtain a multi-modal signal;
[0045] S102: Determine user intention according to the multi-modal signal;
[0046] S103: According to the multi-modal signal and the user's intention, generate robot interaction content in combination with current robot variable parameters.
[0047] For application scenarios, existing robots are generally based on a method for generating interactive content of a question-and-answer interactive robot in a fixed scene, and it is impossible to generate the expression of the robot more accurately based on the current scene. A method for generating interactive content of a robot of the present invention includes: acquiring a multi-modal signal; determining a user's intention according to the multi-modal signal; according to the multi-modal signal and the user's intention, combining current robot variable parameters Generat...
Embodiment 2
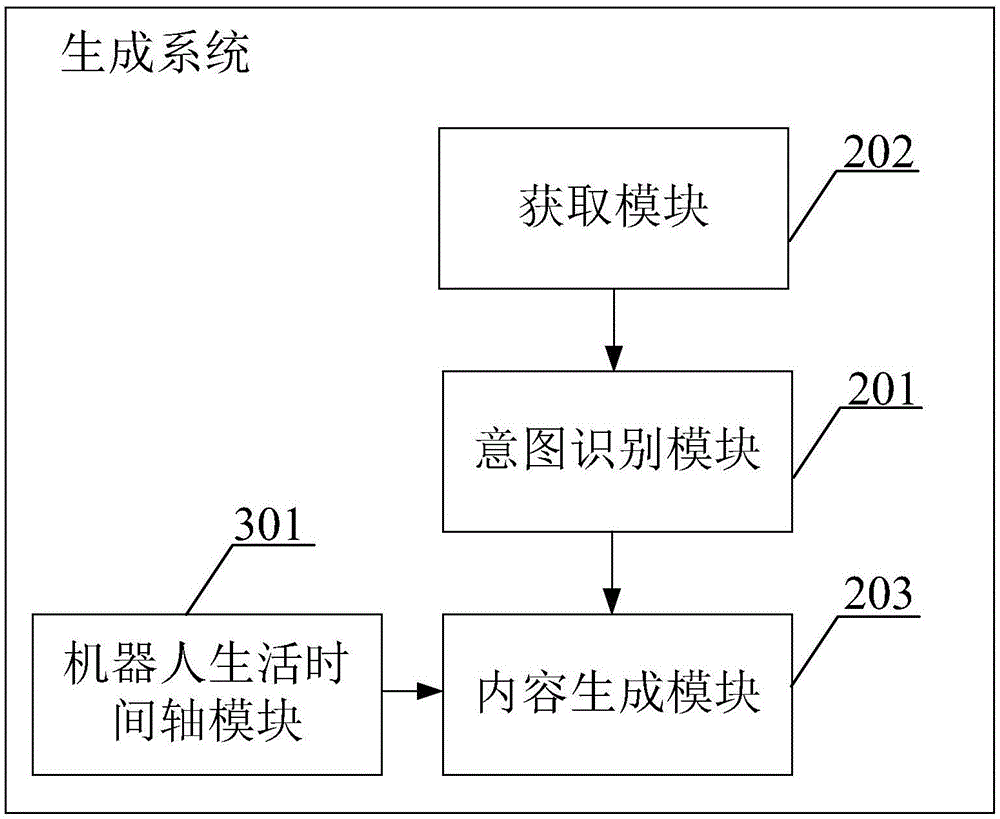
[0066] Such as figure 2 As shown, this embodiment discloses a system for generating robot interactive content of the present invention, which is characterized in that it includes:
[0067] The obtaining module 201 is used to obtain multi-modal signals;
[0068] The intention recognition module 202 is configured to determine the user's intention according to the multi-modal signal;
[0069] The content generation module 203 is configured to generate robot interaction content according to the multi-modal signal and the user's intention in combination with current robot variable parameters.
[0070] In this way, it is possible to more accurately generate robot interaction content based on multi-modal signals such as image signals and voice signals in combination with the variable parameters of the robot, so as to interact and communicate with people more accurately and anthropomorphically. Variable parameters are: parameters that the user actively controls during human-computer interac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More