

Control method of electric tool and electric tool implementing the control method
A technology of electric tools and control methods, applied in the direction of adaptive control, general control system, control/adjustment system, etc., which can solve the problems of high cost, troublesome manufacturing, complex structure of mechanical clutch, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
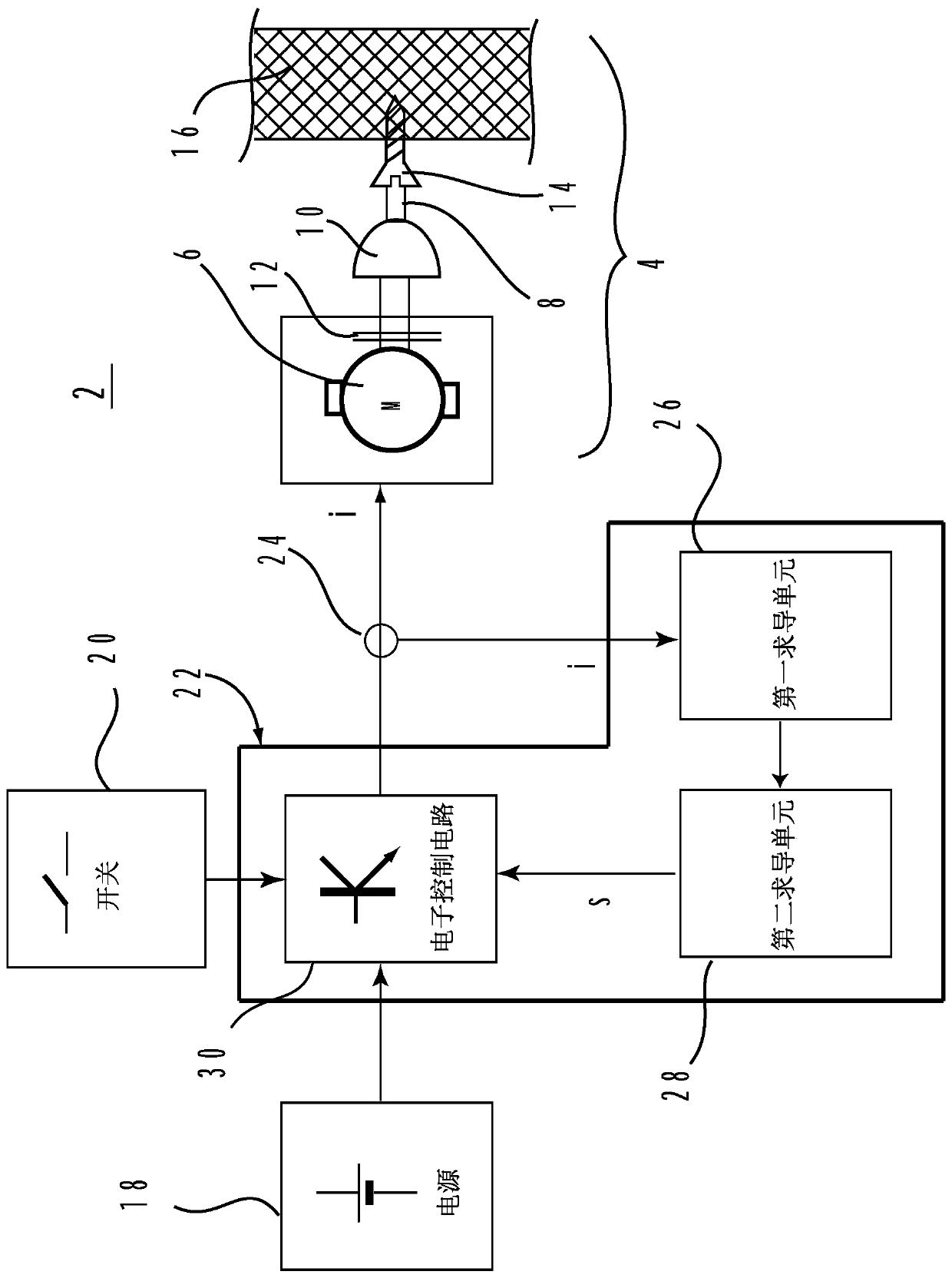
[0060] An embodiment of the present invention provides a control method of an electric tool, such as Figure 20 As shown, the method includes the following steps:
[0061] S1, measuring the parameters used to represent the load of the output shaft that change with time, the parameters include a variety of parameters, such as current, voltage, speed, etc. The measurement method may be sampling at a fixed period.
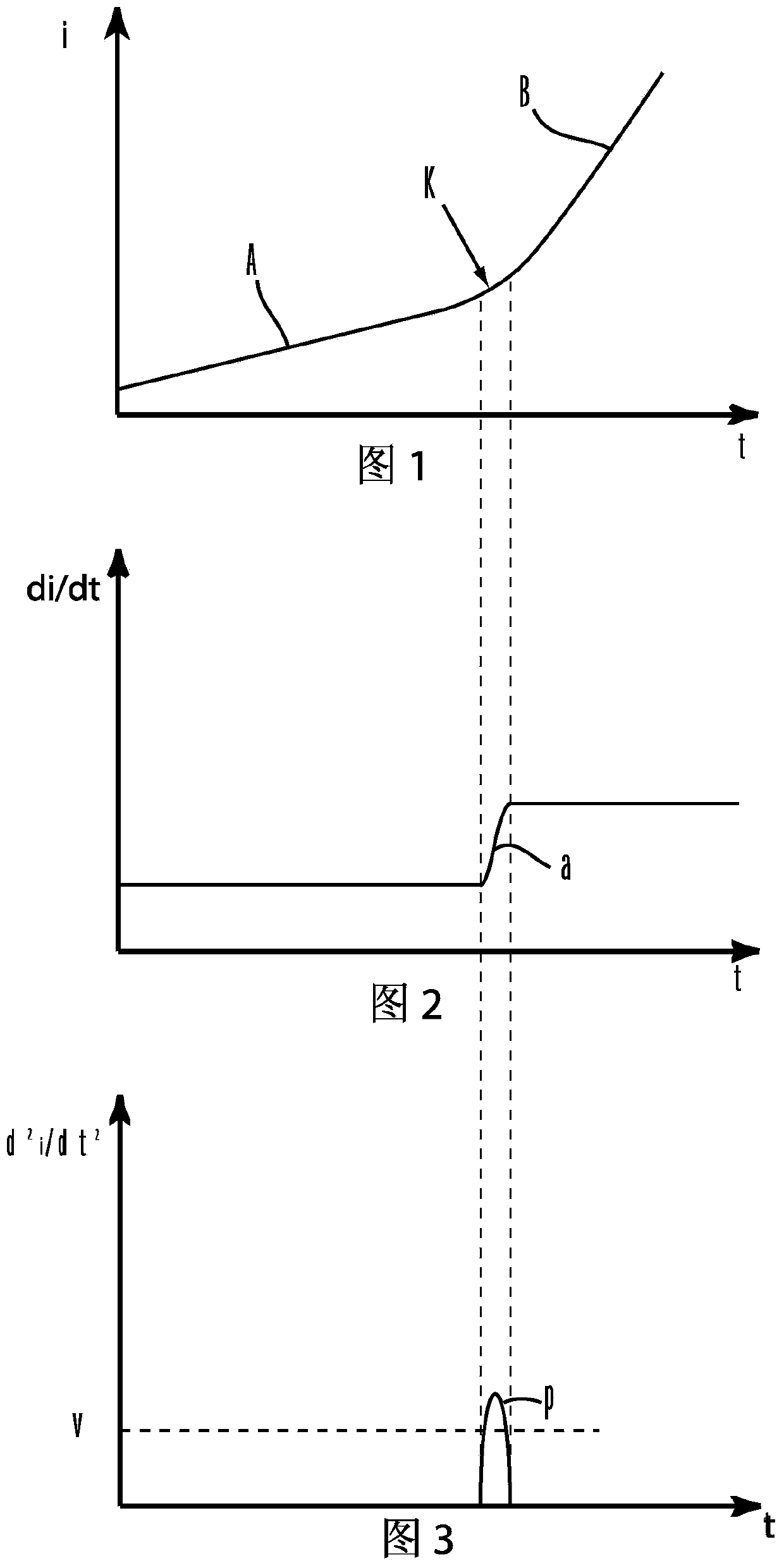
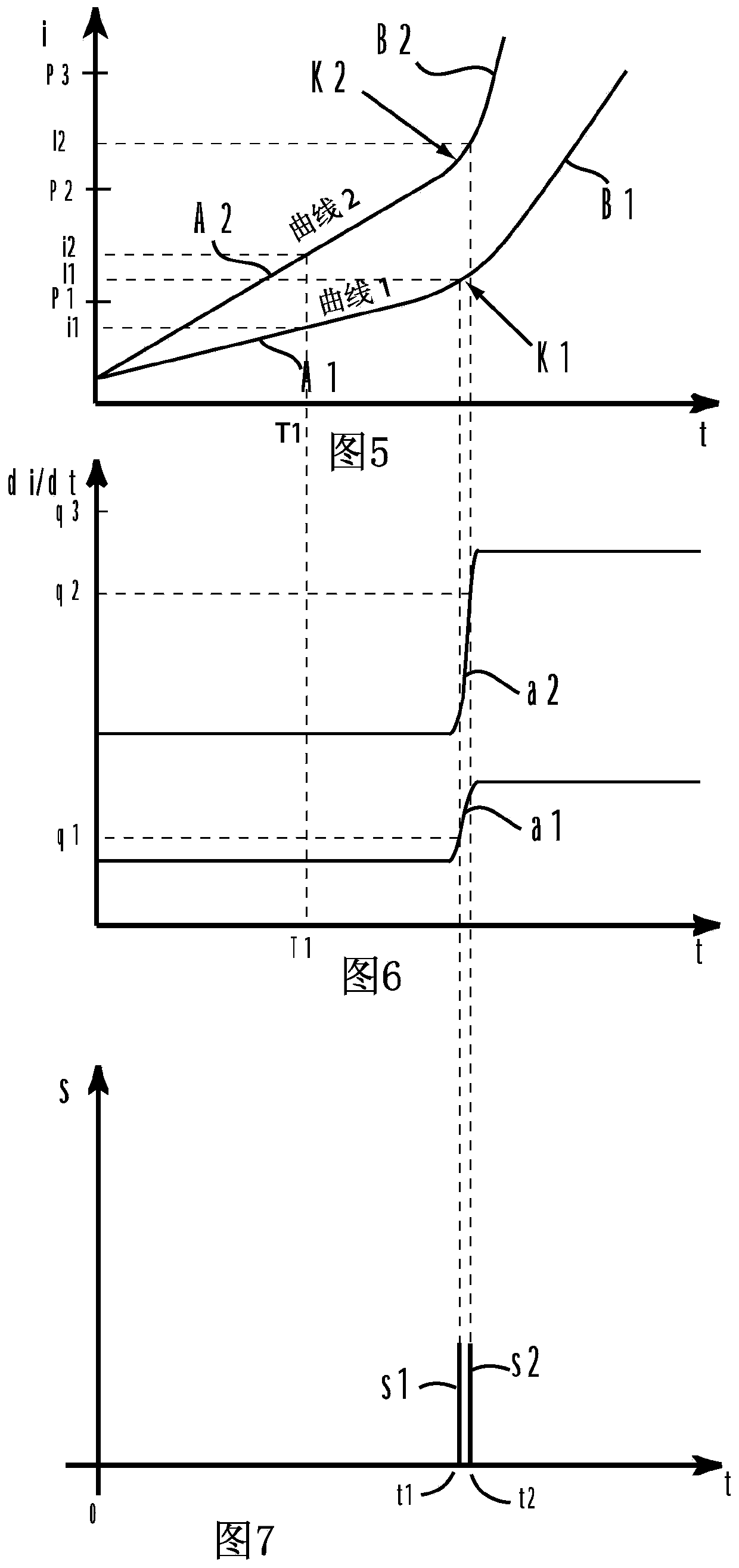
[0062] S2, obtain the derivative of the parameter with respect to time, which can be a first-order derivative, a second-order derivative or a higher-order derivative. This derivative is actually figure 1 The slope of the middle curve. There are many ways to calculate the derivative, which will be described in detail below.
[0063] S3, generating a corresponding control signal based on the derivative, that is, generating the control signal according to any one of the first-order derivative, second-order derivative or higher-order derivative. These derivatives can ...
Embodiment 2
[0106] As mentioned in the previous implementation, figure 2 yes figure 1 The graph of the first order derivative di / dt of medium current i versus time t. in, figure 1 The first part A and the second part B in the figure are correspondingly shown as straight lines parallel to the horizontal coordinate axis t, while the second part K is shown as a sharply rising curve.
[0107] image 3 yes figure 1 Calculate the second derivative d of medium current i with respect to time t 2 i / dt 2 after the graph. in, figure 1 The values of the first part A and the second part B in have become zero after the second derivative, while the second part K is shown as a parabola with an opening downwards, and is in the top area of the parabola (including the apex of the parabola). A specific interval) forms a peak signal p. With reference Figure 4 As shown, when the peak signal p is formed, a control signal s will be generated accordingly. Of course, in a preferred embodiment, a t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More